Much of the coverage we do at ChinaTalk relies on WeChat, the Tencent super-app where most Chinese people send messages, consume content, and share updates with friends and family. WeChat is a huge information ecosystem and an arguably essential resource for following the latest news in China’s AI landscape.
Where should you go on WeChat (and on the broader Chinese internet) to learn about what’s happening in AI? The ChinaTalk Cinematic Universe brings you a comprehensive guide to following AI on WeChat, featuring:
How to make your WeChat work like Substack;
Various types of AI media outlets;
And how to read beyond WeChat.
We’re also looking to run a weekly roundup of the most interesting Chinese developments around AI in the newsletter. If interested, submit a sample here. We pay!
How WeChat Works
Specifically relevant for our purposes is the “Official Accounts” tab. It’s a little like a Substack ecosystem inside WeChat: anyone can open an Official Account on WeChat and publish articles to their subscribers’ feeds — and reading and sharing Official Account articles is a daily occurrence for WeChat users. Government organs, public service authorities, news media (both state-run and independent), and corporations alike use Official Accounts to communicate with citizens.
A screenshot of my (Irene’s) WeChat Official Accounts home page. The circles on top are quick links to Official Accounts I click into most frequently, and the rectangles below are articles by Official Accounts I subscribe to, arranged in a mostly-chronological feed.
Subscribing to relevant Official Accounts is the most streamlined way to read Chinese tech news directly from the source. WeChat makes it very easy for non-Chinese speakers to navigate by putting a “Translate Full Text” option at the top of every article, although the quality of translation remains mediocre relative to what ChatGPT can deliver.
Our Favorites
For headlines:
新智元 AI Era
Founded in 2015 by Yang Jing 杨静, then a researcher at the Ministry of Civil Affairs-affiliated Chinese Association for Artificial Intelligence, AI Era is one of the earliest and most successful media-entrepreneurship ventures to focus on AI in China. AI Era hosted the inaugural World AI Conference (WAIC) back in 2016. Its feed is a blend of repackaged stories from Western tech media, accessible explanations of new ML/AI research, and content for aficionados. While AI Era doesn’t produce a lot of original reporting, it is a solid one-stop shop for keeping up with the Chinese AI Joneses.
QbitAI is an AI-focused media startup whose Official Account similarly reaches many in China’s AI community. Its coverage is relatively accessible and includes popular trends.
Where to start:
How vibe-coding is changing Haidian 海淀, the Silicon Valley of Beijing;
The AI technology stack behind Xiaohongshu/Rednote, China’s trendiest social app.
机器之心 Synced
Founded in 2015, Synced is a leading source of information on emerging tech in China. They cover machine learning research much more closely than more generalist tech publications, and they host their own directory of models.
RoboSpeak is a joint media venture between Zhongguancun Rongzhi Specialized Robotics Alliance (ZSRA), a Beijing-based robotics industry organization, and the startup incubator TusStar, earning financial support from a variety of public and private partners. Its work lies between journalism and think-tank research, and is well-known in the Chinese robotics community.
Where to start:
An interview with Professor Wang Hesheng 王贺升 of Shanghai Jiao Tong University, who will serve as general chair of the 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) in Hangzhou;
Observations from the 2025 China International Industry Fair.
For business-savvy reportage:
36氪 36Kr
36Kr calls itself a platform for “participants of China’s new economy.” It’s a business media outlet with a heavy dose of tech reporting — the TechCrunch of China, if you will — and consequently produces some of the best original Chinese-language reporting on technology as a business. Their deep understanding of the relationships between technology, Chinese society, and the economy makes reading their work particularly informative for analysts.
How entrepreneur Wang Laichun 王来春, whose company Luxshare will build OpenAI’s first consumer device, went from Foxconn factory girl to “the richest Teochew businesswoman”.
A highly abridged translation of ’s article she wrote for us on ‘Why America Builds AI Girlfriends and China Makes AI Boyfriends’ article! See below for her commentary on what they took out.
Thanks to 36kr’s translation, my relatives in China can finally read my work—and thanks to its selective censorship, they don’t have to worry about me running into political trouble! Here are the things that the translation removed, which I guess partly because it is politically sensitive and partly because the translator thought my article was too long:
The Regulatory Comparison: The original introductory analysis comparing U.S. regulatory concerns (FTC inquiry on child use) with Chinese concerns (AI Safety Framework 2.0 on social order and childbirth) was entirely removed. This seemed an editorial choice, as the translators began the translation with their own introduction of my article.
The Core Political Analysis: The entire section linking the Chinese government’s motivation for regulating AI boyfriends to the demographic crisis, low birth rates, and the government’s historical use of the “leftover women” label was omitted. I still credit them for mentioning the stigma of “leftover women,” even though they erased who created it.
The Geopolitical Risk: The discussion detailing the rise and disappearance of the Chinese app Talkie from the U.S. App Store—and its analysis as a potential “more powerful TikTok” national security threat due to intimate persuasion and data risks—was also removed.
Sexual Content Details: The detailed explanation of monetizing sexuality via “freemium” models, including specific mentions of “unblurred explicit images” and ‘NSFW’ features, was heavily condensed. Only the thesis statement “both models seek to capitalize on sexuality to attract and retain users” remained.
Finally, the translator replaced “inside the Great Firewall” (防火墙) with “inside the Great Wall” (长城) when the article shifted to describe the AI companion market in China, suggesting an artistry in how some master the subtleties of translation under censorship.
钛媒体 TMTPost
Another tech-focussed media outlet with a solid journalistic track record, the “TMT” in TMTPost stands for technology, media, and telecommunications. Its coverage of entrepreneurs and Big Tech firms in China is particularly strong. We previously translated TMTPost’s 2024 interview with Unitree CEO Wang Xingxing 王兴兴.
Where to start:
A conversation with Xu Zhijun 徐直军, a rotating chairman at Huawei, about AI compute;
AIstory is a new media brand under Beijing Zhen’gu Media Group (北京真故传媒有限公司), best known for the nonfiction publishing platform TrumanStory 真实故事计划 . The company was founded by Lei Lei 雷磊, a former Southern Weekly and GQ reporter in China, and has excelled at long-form, human-centered reporting despite China’s brutal journalistic landscape. AIstory focuses on humanizing the impact of AI on Chinese society and unearths particularly unique angles beyond labs, policymakers, or investors.
Why DeepSeek created even more busywork for Chinese low-level bureaucrats.
硅星人Pro
By Afra:
A Chinese-language WeChat publication at the intersection of AI, technology, and culture. Its core reporting covers the fast-moving world of large models—DeepSeek, R1, and every new version that emerges—alongside architecture strategies, compute efficiency, cost dynamics, and the competitive landscape shaping the global AI race.
But 硅星人Pro’s regular features dive into tech culture and labor issues, exploring how AI and automation collide with the realities of work, inequality, and the everyday life of engineers, gig workers, and startup employees.
Sometimes you find sarcastic, sometimes salty voice. Readers can expect sharp takes on the AI bubble, founder dramas, job replacement anxieties, ageism in the tech industry, and the broader involution of both Silicon Valley and China’s own innovation scene.
GeekPark (极客公园)
By Afra:
GeekPark (极客公园) is one of the few Chinese tech media outlets that consistently produces in-depth, long-form original reporting on China’s technology industry.
Among domestic outlets, it’s often seen as the closest equivalent to Western tech media: blending narrative reporting, analysis, and insider access in a way that feels more like The Verge and Wired than a typical WeChat information feed.
For wonky analysis (suggested by Bitwise):
中国信息通信研究院 China Academy of Information and Communications Technology
CAICT is a research institute directly under China’s Ministry of Industry and Information Technology, specializing in research on the digital economy and technology policy. Their Official Account publishes helpful executive summaries of their reports and official readouts from various Chinese conferences related to AI. Its feed is certainly less exciting than many of the other Official Accounts mentioned above, but it is a very helpful resource to understand where technocrats in Beijing are placing their attention.
A list of example cases for digitalizing the manufacturing industry in China.
阿里研究院 Alibaba Research Institute
Alibaba’s in-house industry research think tank produces many interesting reports about AI applications, safety, and governance. You should take their findings with a grain of salt on account of their corporate ownership, but their work is nevertheless interesting.
Where to start:
Official transcript of CEO Eddie Wu’s September 2025 speech on the path to AGI;
In contrast to the ARI above, Tencent’s in-house think tank works more broadly across social science and humanistic topics. Their work, influenced by the thorough penetration of Chinese citizens’ private lives by Tencent products, has a stronger focus on how AI is shaping Chinese society.
Where to start:
Annual survey on the Chinese public’s views on generative AI;
Cyber Zen Heart (赛博禅心) is one of the growing AI influencers on WeChat. He updates at breakneck speed, often catching the pulse of a new model, tool, or meme before the mainstream discourse picks it up. Beyond commentary, he has quietly shaped the scene: helping many early AI consumer apps think through their go-to-market strategy, coaching founders on how to generate buzz, and amplifying their launches to wider audiences.
The account is run by the owner, nicknamed”Big Smart”, of Beijing Haidian’s AGI Bar, a late-night hangout where AI founders, hackers, and artists cross paths. His posts swing between news update, “omg this is awesome”-bait articles, and deliberately confusing memes—half koan, half hype cycle. That mix makes him feel like “China’s Lenny” (as in Lenny Rachitsky): a guide and amplifier for a new generation of builders. I wrote about my experience in the AGI bar here.
半导体行业观察
半导体行业观察 is one of China’s most dedicated WeChat publications tracking the chip world. It dives deep into the nitty-gritty technical details of semiconductor design, fabrication, and packaging—so deep that, to a casual reader, it can sometimes feel painfully dry and even boring for someone like me. Where the account shines is in its close tracking of China’s domestic chip research and development. Like many chip-focused outlets, the tone occasionally reflects the geopolitical tensions surrounding semiconductors.
LatePost 晚点
LatePost (晚点) is often described as “China’s version of The Information”: known for high-quality, deeply sourced reporting on business and technology. Its editorial strength lies in exclusive founder interviews, inside scoops, and longform articles that cut through hype to reveal how China’s leading companies. The LatePost podcast—published under the same name—has become a must-listen for anyone trying to understand China’s AI ecosystem.
Luo Yonghao’s Crossing Road 罗永浩的十字路口 is a new longform podcast hosted by Luo Yonghao—once a smartphone entrepreneur, now one of China’s most recognizable internet personalities. Think of him as a mix between Joe Rogan and Lex Fridman in a Chinese context: curious, blunt, and willing to let conversations stretch out for hours
Each episode runs about 3 hours, giving founders, cultural figures, and celebrities the space to share deeply personal stories and unfiltered thoughts. Among the standout episodes is Luo’s marathon conversation with He Xiaopeng, founder of XPeng Motors—widely regarded as a must-listen for anyone who wants to understand the ambitions, struggles, and psychology behind China’s EV wave.
Beyond WeChat
The downside to WeChat’s Official Account ecosystem is that its comment function is often restricted, and it can be hard to go beyond the article if you are looking for more context. Other parts of the Chinese internet can offer more community-based insights on technology and provide direct access to insiders’ views.
CSDN
CSDN, China’s first open-source community, is a web forum for developers that dates back to 1999. Discussions on there feel like a mix of Stack Overflow and Hacker News, and contain many useful technical resources. ChinaUnix is another similar forum.
Zhihu
Imagine if Quora still had loyal users — that’s basically Zhihu. Though it has deteriorated from its heyday as a bastion of liberal debate on the Chinese internet in the 2010s, Zhihu remains a platform where scholars, thinkers, and technologists are quite active. Our story on Kimi relied heavily on Moonshot AI engineers’ commentary on Zhihu, and so did this guest post by Mary Clare McMahon on Huawei’s attempts at bypassing Nvidia CUDA.
Xiaohongshu…?
Yes, that Xiaohongshu/Rednote. If you know what you’re doing, it can be a uniquely valuable resource. Xiaohongshu has an especially strong network effect for academic and tech-focused communities. Searching for ML/AI-related keywords on Xiaohongshu eventually leads you to professors, entrepreneurs, and investors influential in the space, as well as many, many anonymous insiders posting offhand observations and rumours in comment sections. It’s arguably the closest thing to getting those elusive-but-unreliable “vibes on the ground.”
Between language barriers and the Great Firewall, it can seem difficult to get reliable information about the world of technology in China. We hope that by highlighting these great Chinese-language resources, we can encourage more people to conduct their own open-source research and enrich debates in the English-speaking world.
Have other Official Account recommendations? Reply to this email or drop your suggestion in the comments!
We’re also looking to run a weekly roundup of the most interesting Chinese writing on AI in the newsletter. If you’re interested, submit a sample here. We pay!
ChinaTalk is a reader-supported publication. To receive new posts and support our work, consider becoming a free or paid subscriber.
Why do leaders with vast expert bureaucracies at their fingertips make devastating foreign policy decisions? Tyler Jost, professor at Brown, joins ChinaTalk to discuss his first book, Bureaucracies at War, a fascinating analysis of miscalculation in international conflicts.
As we travel from Mao’s role in border conflicts, to Deng’s blunder in Vietnam, to LBJ’s own Vietnam error, a tragic pattern emerges — leaders gradually isolating themselves from their own information gathering systems with catastrophic consequences.
Today our conversation covers…
How Mao’s early success undermined his long-term decision-making,
The role of succession pressures in both Deng’s and LBJ’s actions in Vietnam,
The bureaucratic mechanisms that lead to echo chambers, and how China’s siloed institutions affect Xi’s governance,
The lingering question of succession in China,
What we can learn from the institutional failures behind Vietnam and Iraq.
Jordan Schneider: Let’s kick it off with Mao Zedong. You start the clock after independence. I’m curious, when you think about leaders like Mao who followed their instincts to achieve a remarkable place in world history — Mao bet on himself again and again and won. When Stalin pressured him to make a deal with the Nationalists, Mao said, “No, we’re going to fight and we’re going to win in the end.” Then the Japanese invaded and shifted the balance of power, and in the end, history worked in Mao’s favor.
Most leaders experience a series of successes and luck over the decades it takes them to reach power, which can build psychological confidence in their own instincts. As we think about the interaction between bureaucracies and leaders — when leaders trust their gut over other advice — how does that confidence in their instincts shape their later decision-making? When their instincts conflict with expert advice, do they trust themselves over the system?
Tyler Jost: That’s a great question. You could probably break it down into three categories of explanation.
First, some psychologists think human beings are hardwired to be overconfident. There’s a baseline tendency across the human population that when presented with gambles, people make riskier choices than they probably should, given a dispassionate look at the data.
Second, there’s a category which I think Mao probably fits into — certain personalities tend to be more risk-accepting than others. This could be because some people are comfortable with risks and taking gambles. It could also be because the way we perceive risk can vary among people. Some people might perceive the gamble of war as less risky than others. Mao probably falls into that category.
The third category has to do with the political phenomenon you’re talking about. In foreign policy decision-making, we often study the decisions of presidents, prime ministers, and dictators — leaders who have climbed up the political ladder. They’re already in office. That could trigger a “hot hands” phenomenon — “Look, I was able to get here, this must mean my views are good, and as such, I should trust those instincts as opposed to the data around me.”
Jordan Schneider: I’ve been going back to Ian Kershaw’s histories of Hitler. There are just so many calls in the 1930s where Hitler’s gut was right and the Allies folded. Invading Poland kind of worked out, and invading France went better than anyone could have imagined. There was a point when Hitler’s generals were about to kill him because they thought the calls he made in the late 1930s were too risky.
Then he made some epochal blunders — declaring war on the US, invading the Soviet Union — it’s understandable that someone who went from jail for a failed coup to nearly dominating Europe 20 years later could become overconfident and make terrible calls.
Tyler Jost: This is a book about miscalculation. Both historians and political scientists often try to evaluate individual decisions based on outcomes — if things turned out well, it must not have been a miscalculation, whereas if things didn’t, it must have been. That’s actually a problematic approach to history.
You can make a decision that ends up working out even though it was based on horribly inaccurate views of the world, and vice versa. If we really want to study the quality of decision-making, we have to start with temporal analysis. We have to look over time rather than examining any single decision.
If you had a 5% chance of things going your way according to the data, then that’s still a 5% chance. But if you keep making that bet over and over again, eventually it will catch up with you. For methodology— and this applies equally when doing historical analysis — you want to take a bird’s-eye view. What is the pattern of success and failure over time as opposed to specific instances in isolation? The book tries to go deep in particular cases to illustrate the mechanisms, but it’s important to start with base rates.
When Mao Stopped Listening to Bureaucrats
Jordan Schneider: You can tell a story of the 1930s where the international world is weak and ripe for toppling, but suddenly the most Jewry-Bolshevik infested one happens to be the one still fighting even after losing millions of people in the summer and fall of 1940. You can draw terrible extrapolations based on a limited set of data points.
Let’s return to Mao. From an epistemological perspective, you have a ton of material from the Nianpu 年谱 of what the daily leaders are discussing and the documentation of their decision-making. Were you surprised that all of this was out there for you to sink your teeth into once you started investigating?
Tyler Jost: The Chronicle of Mao Zedong or Mao Zedong Nianpu 毛泽东年谱 was released just before I started graduate school. I don’t think I realized then how lucky I was in my timing. The party archives publishes compendia of daily activities of senior revolutionary-era leaders, such as Mao’s meetings with his advisors and Mao’s meetings with the Politburo. Not just the ones that were released or publicized in The People’s Daily 人民日报, but the private ones as well, where the real action happened.
I stumbled into this, knowing I was interested in writing a dissertation about decision-making. It so happened that the most detailed records pertaining to Mao’s decision-making had just been released by the party.
Jordan Schneider: Give us an overview. You periodize Mao’s administration from 1949 to 1962 and from 1963 to 1976. Let’s start in that early era. What was the national security decision-making apparatus that he was working around?
Tyler Jost: Through all of these frameworks, start with the leader. I’m interested in miscalculations about questions of war and peace. The assumption at the starting point — this is a theoretical assumption you could question, but I try to show empirically that it’s sound — is that you have to get the leader on board. Leaders make the final call on big decisions in foreign policy. There could be other subsidiary decisions that low-level bureaucrats get to make on their own, but the starting point for any analysis has to be the leader.
This is an easy assumption that aligns with the historical understanding of Mao’s era. Mao was a dominant force in decision-making. The reason I say that the period between 1949 and 1962 was different from roughly 1963 to the end of Mao’s life is that the system Mao created when they founded the government in 1949 was, comparatively speaking, quite integrated.
What do I mean by integrated? There were many mechanisms by which the leader was able to reach down into the Chinese party-state and extract information needed to make decisions. There was an unusually high status of the Foreign Ministry, which was a function of the fact that many individuals who went into the Foreign Ministry early on had been part of the military and had revolutionary credentials. This included Zhou Enlai 周恩来, who was the first foreign minister and concomitantly the Premier 总理 of the country at the outset. His replacement, Chen Yi 陈毅, was similar — one of the Ten Marshals 元帅/大将.
So that’s a diplomatic core or critical mass of diplomatic information that Mao had access to. Then obviously there’s the military. The military already had a high standing and good access to get information up to Mao. From the late 1940s to the early 1960s, Chinese leaders’ ability to get the information they needed from the state system was pretty good.
Jordan Schneider: Okay, let’s take it to 1962. What was happening between the mainland and Taiwan?
Tyler Jost: 1962 is four years into the Great Leap Forward. The Chinese economy is doing incredibly poorly. There’s a suspicion that perhaps the regime is not fully stable. In the spring of 1962, Chiang Kai-shek, who had been monitoring the situation on the mainland very closely, got it in his head that this was his last favorable opportunity to take serious military action (“Project National Glory/國光計劃”) against the mainland to foment a revolt that would ultimately topple the communist regime.
He takes a series of actions, from writing in his diary about how serious he is about military action against the mainland to setting up internal Taiwan military bodies, convening military planning meetings, and reaching out to the Americans to see whether they would support something.
Unfortunately for Taiwan — and this is eventually what’s discovered by Mao — this is a year after the Bay of Pigs in the Kennedy administration. The US and Taipei had signed the Mutual Defense Pact a couple of years prior, which essentially gave veto authority to the US for any major military operations, including the one Chiang had in mind in 1962. Chiang essentially has to decide whether he’s going to go it alone, go back on the treaty commitment, or just back off. That’s the scene setter before we get to the mainland side of things.
Jordan Schneider: What did Mao know? When did he know it, and what was the decision space he was facing once he started hearing whispers of Chiang restarting the civil war?
Tyler Jost: Mao gets a pretty early wind that something serious is happening in the spring of 1962 through intelligence channels. He immediately engages with the bureaucratic establishment. There’s a series of Politburo, Central Military Commission, and Leading Small Group 领导小组 meetings, all of which are activated to determine what China should do.
What’s remarkable about this — because this is 1962, four years into the Great Leap Forward — is that the Foreign Ministry is at the table, military officers are at the table, and there’s pretty candid discussion, particularly given that Mao early on in the crisis seems to indicate he’s taking the chance of an invasion seriously.
Beijing eventually lands on a two-pronged strategy. One in which the PLA is going to mobilize, but do so publicly to showcase that it’s aware of what’s happening and prepared to defend itself militarily. But then critically — and this is where the Foreign Ministry and Zhou Enlai play a big role — they activate a diplomatic channel that the PRC has with the US.
Remember, this is the Cold War, so there’s no formal diplomatic recognition between the two countries, but there is an ambassador-level channel in Warsaw through which the two sides can communicate. The Foreign Ministry officials, including Foreign Minister Chen Yi, have this intuition that Chiang Kai-shek is probably going rogue, and it’s unlikely the US is behind it. If the US isn’t behind it, they’ll likely be able to rein Taipei in.
That’s exactly what they do. They reached out to the US in Warsaw in the summer of 1962, and received a message loud and clear that was personally approved by Kennedy. It’s fascinating — I trace that message from Kennedy to the US ambassador in Poland to Wang Bingnan 王炳南, the representative from the PRC side. We have both the US cable and now the Chinese cable. We know the distribution list for the cable on the Chinese side. It goes not just to Mao Zedong, but to all the senior Politburo members, members of the Diàochábù 调查部 (the domestic and foreign intelligence agency at the time), Foreign Ministry, CMC, and so forth.
Wang says in his memoir — and I think this is proven by Mao’s subsequent actions — that the information coming through the Foreign Ministry channel had a big impact on Mao’s thinking. You can imagine it breaking very differently. Think about the First Taiwan Strait Crisis or the Second Taiwan Strait Crisis — Mao had previously used violence to achieve his military goals. He doesn’t in ‘62 — he’s more circumspect, in part based upon the information the Foreign Ministry was able to gather for him.
“Independent”《獨立》 by Taiwanese artist Yuan Jai 袁旃, 1997. Source.
Jordan Schneider: There were other times in the 50s where he saw the upside of escalating — in the Korean War and then in the Taiwan Straits, where he seemed to think, “We need to make sure our revolutionary fervor is still high.” It’s interesting that the Great Leap Forward, as you argue, has him calibrate down how aggressive he’s willing to be in running risks. So Mao, good job, you avoided World War III in 1962, but seven years later you’re back at it again. What was he thinking in the China-Soviet border disputes in ’69 that almost brought us to global thermonuclear war?
Tyler Jost: It’s probably an exaggeration to say either of those would have resulted in a world war. Things certainly were worse in ’69 compared to ’62.
Again, it’s important to provide some context. By 1969, the Sino-Soviet Split 中苏交恶 was well underway, and the two sides were increasingly confrontational, both vying for leadership in Africa and Southeast Asia, and also along their shared border. They had unresolved territorial disputes dating back to the founding of the PRC. A series of skirmishes, particularly on the northeastern part of China’s border, began to escalate in the late 1960s.
Alongside this is the Soviet invasion of Czechoslovakia under the so-called Brezhnev Doctrine in 1968. The combination creates real anxiety in Beijing about what might happen. Mao gets it in his head that some sort of Soviet military action needs to be countered, and the right strategy is through a clear demonstration of military force — hit first, demonstrate resolve, and the Soviets to back off.
Mao was wrong on two fronts. First, the Soviets would not back off. Second, he misjudged the severity with which the Soviets were contemplating military action prior to China initiating conflict in March of ’69.
From the behavioral indicators of the Soviet Union — what does the Soviet Union do in response to the ambush in March of ‘69? They escalate, both locally in the northeastern part of the border and by August, opening another front in the western part of China’s territory. By fall 1969, the Soviet Union was making veiled nuclear threats. How serious those threats actually were is debated quite fiercely among historians. But China took the threats seriously.
Based upon the Soviet records we have prior to March 1969, there’s no indication that military action was in the offing. In other words, Mao creates the type of military escalation he fears through his own actions. From that perspective, I argue that the Sino-Soviet border conflict in 1969 was a miscalculation on Mao’s part.
There are many ways of trying to rescue rationality or good judgment from disaster. There are potential ways to say, “Well, maybe Mao was after this or that,” and in the book, I try to address each one. But the argument the book makes about why this miscalculation occurs has to do with how institutions linking the leader to the bureaucracy had changed.
Unlike ’62, the lead-up to and then the Cultural Revolution 文化大革命 itself had decimated the connective tissue between Mao and the foreign policy bureaucracy. This begins around 1962 as Mao starts contemplating his own death. The quote nominally ascribed to him is “What will happen after I die?” Mao increasingly feared that what he observed during the Great Leap Forward was a premonition of the lack of revolutionary zeal that would overtake the Party after he was gone. In that regard, he was absolutely right.
How do you prepare for that? You need to begin attacking key leaders within the bureaucratic establishment who you perceive to be not revolutionary enough. This happened as early as fall 1962 and continued. The way Mao made decisions in ’63, ’64, ’65 shifted. The forums he used became more insular and exclusionary. All of this built up to the atomic bomb that Mao unleashed upon the foreign policy bureaucracy in the Cultural Revolution.
Jordan Schneider: Is it fair to consider ideology versus cold calculation as a variable? In 1962, he was burned by a dumb series of ideologically driven decisions that starved tens of millions of people, and he was reconsidering. By 1969, he was at a very different point, and he was seeing ghosts — both in the Party and around the world — which led him to read the Soviet Union poorly.
Tyler Jost: There are several ways to think about ideology. I want to emphasize that it’s important as a driving force in foreign policy decision-making, not just in China but in other countries as well.
One way to think about ideology is as a baseline set of left and right limits about what is permissible to political debate.
In Beijing, the Cultural Revolution narrowed the range of politically permissible opinions one could potentially have. This is bound up in how the institutions I discuss in my book are expressed. These institutions are the rules governing how a leader and a bureaucrat are supposed to interact. There’s a literal sense in which those rules can shape information flows between actors.
If I eliminate the Politburo, that removes a mechanism by which information flows upward to the leader. The transaction costs associated with getting information to the leader might be higher, but there’s also a strategic element to how bureaucratic actors respond to rule changes.
The rupture of connective tissues between leaders and bureaucrats — fragmenting the system — signals to bureaucrats about the political and ideological environment. In environments where this connective tissue has been stripped away, bureaucrats become more cautious in their reporting.
ChinaTalk is a reader-supported publication. To receive new posts and support our work, consider becoming a free or paid subscriber.
They end up spending energy not on determining the true state of the world, but rather on figuring out what they think the boss believes.
In that type of environment where information flow between leaders and bureaucracies is poor, bureaucrats focus on three questions: “How can I find out what the boss thinks? How can I find information that confirms that prior belief? And if I can’t do either of those things, how can I make my report so vanilla that no matter what the leader actually thinks or what actually happens, I remain safe?”
The result is either ideologically charged information designed to confirm what the leader has deemed ideologically correct, or reports so stripped of meaningful content and filled with ideological dogma that they’re no longer useful to the leader.
Jordan Schneider: This reminds me of Hitler. There was someone who walked around with what they called a “Führer machine” with big fonts because Hitler’s eyesight had deteriorated by the time the war started. Whenever they saw Hitler feeling down, they would print out an article saying how awesome and amazing he was and how everything was great. When you reach the point where you need psychological boosters of feeding leaders information that makes them feel good, you’re probably not in the best state for good, hard-nosed national security, analytical decision-making.
Tyler Jost: Indeed. One argument I encountered early in this project was that once leaders destroy this connective tissue, they know they’ve done so. They know their subordinates, being rational and strategic players, have incentives to provide biased information. Shouldn’t a rational leader then discount everything supplied to them?
In that fragmented institutional arrangement, it might seem to revert to a single leader making decisions independently, without necessarily making the situation worse. The argument I make in the book is that while this might theoretically be true, if we accept that human beings are prone to bias and enjoy hearing good news about themselves without properly discounting information that confirms their priors, then this situation can lead to an echo chamber.
Jordan Schneider: Another interesting dynamic you explore is fears of a coup. This was obviously relevant in Hitler’s case and very relevant for Mao as well. They began to wonder, “Are my generals going to shoot me and throw me overboard?” With Mao, Stalin’s case hung over him as the disaster he wanted to avoid — losing revolutionary edge and having the founder of the nation thrown under the bus.
Tyler Jost: Precisely. The book argues that these institutions don’t arise deus ex machina — they don’t appear out of nothing. They’re political choices informed by leaders’ calculations about how much threat the bureaucracy poses to their political survival and agenda, and how much they need that bureaucracy to accomplish their goals while in office.
The most troubling combination, exemplified by the Cultural Revolution, occurs when leaders perceive the bureaucracy as threatening.
In Mao’s case, he was concerned about what the bureaucracy would do after he was gone and felt the need to rekindle revolutionary fervor in the party. The worst scenario is when leaders both fear the bureaucracy and are inwardly focused on domestic rather than international policy.
You can imagine a different world where you fear the bureaucracy but face a threatening international environment and have ambitious international goals. In that case, you would need to balance your fear with the demand for information that only the bureaucracy can provide. The worst combination occurs when you fear the bureaucracy, but you’re inwardly focused and have no need for their expertise. In that situation, why assume any risk? You simply cut them out.
The Other Vietnam War
Jordan Schneider: Let’s fast forward to Deng Xiaoping in 1979. What was Deng thinking in ’79 when he ended up invading Vietnam?
Tyler Jost: The 1979 case is a forgotten war, but it shouldn’t be because it’s really consequential, both in terms of the geopolitics of the Asia Pacific region for the last stretch of the Cold War and what it tells us about decision-making in China and its potential pathologies.
China decided to launch a punitive war against its southern neighbor, Vietnam, in 1979. The logic that Deng consistently articulated both internally and externally was that China needed to punish Vietnam for its invasion of Cambodia and its growing relationship with the Soviet Union through a demonstration of battlefield strength.
The PRC planned to invade for a short period of time to display the power of the People’s Liberation Army (PLA). They frequently used the phrase that they were going to “teach a lesson” to their southern neighbors. The analogy at the forefront of decision-makers’ minds, particularly Deng’s, was the 1962 war with India, where this strategy worked reasonably well.
In 1962, the Indians underestimated Chinese military capabilities. The battlefield demonstration that fall showed that the PLA was a force to be reckoned with. They had the upper hand at the border, and India revised its policies accordingly.
That success wasn’t replicated in 1979. To be fair to Deng Xiaoping, China did eventually achieve its tactical military objectives. However, the strategic motive — the real reason why China invaded in the first place — was not met. There are these quotes from newly available Vietnamese archival evidence where they state, “It was not China who taught us a lesson; it was we who taught them a lesson.”
Even though the PLA eventually reached its tactical objectives, the high casualty rate and slow advance demonstrated how severely the Cultural Revolution had damaged the PLA. The military prowess that the war was supposed to highlight in the eyes of Vietnamese decision-makers failed to materialize. From that perspective, the strategic calculation failed.
Jordan Schneider: What were the analytical errors that Deng made in this decision?
Tyler Jost: Part of it stems from misunderstanding the state of the PLA. Most evidence suggests that Deng eventually realized this prior to the invasion, around January. Ironically, most good information Deng received right before the invasion came through informal channels because people were afraid to speak candidly in more formal settings.
By that point, Deng had already committed himself to pushing this forward as part of his political agenda, making it difficult for him to back down by January.
There was another set of geopolitical and diplomatic errors: a lack of consideration for how Vietnam would respond if the PLA didn’t perform as well as it had in 1962, and a failure to assess what that would do to Vietnamese perceptions of PRC capabilities and resolve. That question was never asked. The debate around the war was very shallow.
In December 1978, the months prior to the war, they also misread the US. This is interesting because it’s sometimes suggested — partly as a political strategy Deng employed after the war failed to achieve many of its strategic objectives — that the war was a way of demonstrating China would be a good ally to the US. The narrative implies the US was secretly encouraging China to take this action, and Deng was taking one for the team to establish good credentials and secure normalization and healthy relations against the Soviet Union in the 1980s.
Deng Xiaoping visits the US, February 1979. Source.
What we now know from US archives is that President Jimmy Carter actively discouraged the invasion. Deng Xiaoping took his famous trip to the US in January 1979, right before the invasion. Carter discouraged him both in small groups of advisors and in one-on-one meetings. Carter told Deng, “You have other options available to you. You could move your forces to the border and engage in a series of limited operations which might draw some Vietnamese forces north away from Cambodia without risking the international backlash this war will create.”
Jordan Schneider: The Vietnamese had defeated the Americans. Did the Chinese think the Vietnamese were unprepared? Regardless of the internal assessment of the PLA, the fact that Deng thought Vietnam wouldn’t be ready for a fight after spending 15 years battling the most advanced military in the world — and that they couldn’t stand up to China — is absurd.
Tyler Jost: It’s interesting. This dovetails with your first question about why people tend toward optimism in their assessments when they don’t examine data. This would be one potential data point supporting that first category of explanation.
Jordan Schneider: What do you think about Joseph Torigian’s argument that this was actually just a way for Deng to solidify power domestically? Hua Guofeng 华国锋 was leaving the scene, Deng was coming in, and almost everyone in the bureaucracy disliked the decision. But Deng said, “I’m going to show who’s boss. We’re going to do this anyway.” This was how he fully demonstrated to the system his control over the PLA — by forcing them into doing something they didn’t want to do, showing he was the new Mao.
Tyler Jost: There are two ways of thinking about this argument. Joseph’s book discusses it, but the most detailed articulation of this political motivation comes from Xiaoming Zhang’s excellent book Deng Xiaoping’s Long War.
The first interpretation, which Professor Zhang emphasizes, is that the PLA needed reform. Deng needed to demonstrate the military weakness of the PLA to drive organizational reforms within the military. The interesting thing is that the primary evidence for this logic comes from a speech given toward the end of the conflict.
There are two ways to read this. Deng was certainly aware of what he called “bloatedness” within the military in the 1970s. However, it’s very difficult to find anything in the historical record prior to the war where he states that the war would allow him to pursue this political agenda.
One interpretation of the fact that this document appears toward the end of the conflict is that perhaps he felt this way all along, which is certainly possible. We must be circumspect about asserting what leaders believed at certain points. But to me — and Joseph wrote this in his book as well — that speech reads quite defensive, as though Deng was trying to justify what he’d done. From that perspective, one could argue it was an ex post rationalization for what China gained from the war, rather than a belief Deng held throughout.
The second interpretation is as you articulated it — Deng knew the position would be unpopular, but pushing through an unpopular policy would demonstrate political strength, affirming his position vis-à-vis Hua Guofeng. That’s also possible.
The weakness in that argument is the intimate involvement Deng had in planning the war. If we accept that the war didn’t go as Beijing hoped and Deng was responsible for planning it, that’s an enormously risky move because he tied himself to the planning process. While possible, this explanation wouldn’t account for many other aspects of the overall decision-making process.
Jordan Schneider: More broadly, do you get more erratic decision-making when you have a leader who feels comfortable in power, or when they’re at the beginning or end of their reign, or when they perceive domestic threats?
Tyler Jost: Going back to our discussion about the Cultural Revolution, there’s an analogous argument here as well. The political contestation inside Beijing is important to the story I tell in my book.
Elite politics were quite contentious in the mid-to-late 1970s, making it beneficial to keep institutions fragmented.
The connective tissues ripped out from the Chinese system during the Cultural Revolution weren’t repaired. Most attempts to restore connections between leaders and the bureaucracy didn’t happen until after the Hua-Deng power struggle subsided in the 1980s.
Jordan Schneider: Fast-forwarding to 2025, much discussion revolves around whether Xi Jinping will stay in power. It’s important to internalize that China’s last major military action began right after a power transition. Xi will eventually die, leading to another power transition with volatility that might cause leaders to make terrible decisions. This insecurity appears in many of your case studies, causing people to narrow their information sources and make increasingly reckless decisions.
Tyler Jost: That’s exactly the right question to ask. While I don’t speculate about Xi Jinping and Taiwan, the succession problem and the institutional choices Xi must make to navigate those perilous waters deserve more attention. War could theoretically result from power balance shifts, perceived lack of American resolve, or miscalculations before that point. However, the succession problem remains the unnoticed elephant in the room that will become more obvious as time passes.
Jordan Schneider: Is there another case study of succession-driven decision-making?
Tyler Jost: Mao’s case is the primary succession example. You can view the 1969 conflict as rooted in institutional choices Mao needed to make to secure his legacy after his anticipated death in 1976.
The succession problem can also be viewed from the other side of the transition — whoever inherits power is likely in a politically precarious position because of the types of people that leaders, particularly personalist ones, bring into their inner circle toward the end of their tenure. These successors inherit foreign policy problems and dysfunctional institutions that make them prone to miscalculation. That’s what happened in the 1979 war.
Jordan Schneider: Toward the end of a leader’s tenure — whether democratically elected or autocratic — you argue, the quality of their advisors declines. Can you choose a case study to illustrate this?
Tyler Jost: One of the most fascinating aspects of foreign policy decision-making is how political selection institutions — what we typically describe as the difference between democracy and autocracy — both matter and don’t matter.
One benefit of democracy is that outgoing leaders don’t have to worry about what happens after they leave office and face constraints on how they can arrange the political landscape after their departure. In that sense, autocracy creates more opportunities for the pathological institutions my book discusses.
Nevertheless, democratically elected leaders can still fear what bureaucracies might do to them politically. Two cases examine this in depth. The first is the Indian side of the 1962 Sino-Indian border war and Nehru’s apprehensions about the foreign policy establishment, particularly the Defense Ministry and military and intelligence apparatus.
The second example occurred right here in the US — the reconfiguration of the National Security Council under Lyndon Johnson after he assumed office following JFK’s assassination in 1963.
Jordan Schneider: Let’s discuss Vietnam. After JFK was assassinated, LBJ was suddenly in charge of JFK’s people, who hated his guts and were about to kick him off the ticket before JFK died. Take it from there, Tyler.
Tyler Jost: The argument in my book is that these dynamics you described — this unusual path to power in 1963, coupled with LBJ’s psychological predispositions — led Johnson to be tremendously paranoid that the bureaucracy threatened his political agenda. His primary focus was passing two hugely consequential pieces of domestic legislation pertaining to civil rights and the Great Society. We have him on record, both during and after his presidency, saying that these were his priorities.
Jordan Schneider: You quote him saying that Great Society legislation was “the one woman I truly loved.” As a serial adulterer, that statement carries weight coming from LBJ.
Tyler Jost: Earlier, we discussed the worst possible political environment for institutional efficiency and effectiveness. It’s a situation where you deeply fear the bureaucracy while focusing on domestic agenda items. The irony is that while Johnson inherited a reasonably well-functioning foreign policy decision-making apparatus, he intentionally took steps to undermine it.
Johnson established a very insular forum for his decision-making process known as the “Tuesday Luncheon,” which excluded a vast swath of the national security bureaucracy from important discussions. His reasoning was clear. In a retrospective interview quoted in Doris Kearns Goodwin’s book Lyndon Johnson and the American Dream, Johnson stated he knew the bureaucracy would punish him through information leaks that would make him look bad. He believed that when he held National Security Council meetings, information would “leak out like a sieve.” In contrast, these Tuesday luncheons never leaked anything.
Johnson’s logic for reorganizing the decision-making institutions was entirely political — a careful calculation he made. However, he paid a big cost for this approach. While making the most consequential choices of the second half of the Cold War for the US, he committed perhaps the biggest blunder in American Cold War history. It cost him politically in 1968, and he decided not to run for reelection because he knew he would lose.
Jordan Schneider: Let’s dive deeper into 1965. What information didn’t Johnson receive that might have led him to avoid escalation in Vietnam?
Tyler Jost: You can trace this back even further to the summer and fall of 1964. Several key individuals expressed deep apprehension about escalation in Vietnam — George Ball, Chester Cooper in the National Security Council, and others in the State Department’s intelligence apparatus (INR), like Allen Whiting.
All these individuals were systematically sidelined. There’s a myth that George Ball was given a voice in the spring of 1965, but in my book, I demonstrate that his influence was minimal compared to what he tried to communicate to Johnson earlier in the summer and fall of 1964.
As a result, all key decisions regarding escalation occurred in a very insular setting. LBJ was advised principally by McGeorge Bundy (National Security Advisor) and Robert McNamara (Secretary of Defense), with Dean Rusk present but clearly suffering from a degree of imposter syndrome. Johnson made the call for escalation based on a very narrow set of information and considerations, and the results speak for themselves.
The Making of Siloed Institutions
Jordan Schneider: Fast forward to 2016. Let’s discuss Trump’s national security decision-making in this context.
Tyler Jost: I should caveat this by saying that the study doesn’t consider the Trump administration’s decision-making institutions in any way, shape, or form, but it has a theoretical framework that we could apply. We can think about Trump’s position coming into office in 2017 and what happened within the decision-making structure.
Generally speaking, President Trump inherited a number of international problems in 2017, ranging from North Korea to Afghanistan to other parts of the Middle East. The demand for information and advice from political advisors or the national security establishment remained substantial. However, Trump came in with healthy skepticism and limited experience dealing with the foreign policy bureaucracy.
These two countervailing forces — the threatening aspect of his position and the demand for solutions to Afghanistan and North Korea — placed him in a middle ground that the book discusses.
I call it a “siloed institution” where you limit what any single bureaucracy can do independently while still depending on them.
It resembles a hub-and-spoke system with the leader at the center. Individual bureaucratic nodes gain access and relay information upward, but they don’t communicate effectively with one another or coordinate particularly well.
Some evidence suggests this might have occurred, at least at the margins. Journalistic accounts have revealed that lower-level components of the National Security Council system — which have existed for decades and serve as connective tissue at the deputies and sub-deputies levels for information sharing, policy coordination, and analysis — were perhaps less frequently utilized. This would be consistent with the arguments.
The outward-facing signaling or messaging strategy sometimes appeared confusing. While it’s possible Trump was orchestrating some strategic plan behind the scenes, from an outside observer’s perspective, it seems some foreign policy actions weren’t as well-coordinated as they could have been. That said, in the broader scheme, the first Trump administration doesn’t resemble anything like what we saw under LBJ, much less during the Cultural Revolution. It’s important to maintain this comparative reference point.
Jordan Schneider: What about in Trump’s second term?
Tyler Jost: It’s early days. Trump hasn’t revoked the National Security Council. He may have established some parallel structure behind the scenes that we’re unaware of, similar to the Tuesday luncheon, which would send signals to the bureaucracy with a chilling effect even at the highest levels. Within the framework of the book, which focuses on high-level institutional interactions between leaders and bureaucracy, it’s difficult to ascertain from the outside how much Trump has pushed things even in the direction of LBJ.
Warning signs exist, however. The reorganization of USAID is particularly informative to people within the bureaucratic establishment. To be fair, having a Foreign Ministry or Department of State oversee USAID’s responsibilities isn’t unheard of. Placing their personnel within the State Department isn’t outlandish. It’s entirely reasonable for a president to have a foreign policy agenda that curtails foreign aid distribution.
Whether we agree with that policy is separate from how it affects the decision-making process. The means, process, and scope of organizational change bound up in the USAID actions represent the biggest warning sign. We shall see what unfolds in the coming months and years.
Jordan Schneider: I take your point, Tyler, about it being early days on the bureaucratic reorganization front. However, you can also examine the personnel perspective regarding the types of senior advisers now in place, which presents a very different complexion than what we saw in Trump’s first term and feels more like late Mao than early Mao.
Tyler Jost: That’s a fascinating point. The book doesn’t focus centrally on appointing loyalists versus experts, but other areas of political science address that trade-off. They don’t necessarily conceptualize institutions as I did — they think more in terms of hiring criteria, whether it’s credentials for the job or absolute fealty to the leader. It’s an analogous political problem.
The book can’t speak as directly to this question, making it somewhat more difficult to apply the framework to the first versus the second Trump administration along this dimension. Nevertheless, it’s an important question we should continue to monitor.
The “red versus expert” debate is simply one way of articulating the standard expertise-versus-loyalty trade-off that many economists and political scientists have discussed. Some people think this debate is unique to China, but while the formulation may be uniquely Chinese, this represents a perennial political problem.
Jordan Schneider: It’s an LBJ issue, too — he didn’t want people leaking. What do you gain and lose by leaning “red” or leaning “expert”?
Tyler Jost: You can think about this issue in both functional and strategic terms. In the functional sense, imagine a stylized model where you have two candidates. One possesses all the indicators and benchmarks suggesting they’ll excel at the job. The other lacks those attributes but demonstrates complete loyalty — they’ll do exactly what you want once in office.
Often, these indicators aren’t so stark, and typically, you seek people with elements of both qualities. But keeping the model simplified — from a functional perspective,if you choose the candidate without expertise (defined by indicators of job performance), you’re reducing government capacity. You’ve screened candidates solely on loyalty rather than competence, limiting their ability to perform effectively.
The strategic dimension requires more nuanced thinking. Imagine both candidates secure positions and face choices about how to perform their duties and what risks they’ll take to advocate for what they believe is right. The candidate with strong performance credentials has something to fall back on when speaking truth to power. They can justify diverging from the leader’s view because they have experiences underpinning their judgment.
Contrast this with the candidate chosen solely for political loyalty. They have little foundation except the leader’s trust in their allegiance. This fundamentally shapes how they seek information. They’ll likely pursue data confirming what the leader wants to hear and demonstrate risk aversion in identifying new developments in the international environment. This leads to those bland, vanilla reports characteristic of fragmented institutions.
Jordan Schneider: It’s a leveraged bet on the leader’s gut instinct — if you go more “red,” you get more of the leader in whatever policy emerges, for better or worse.
Tyler Jost: Precisely. The book was inspired by a wave of political science literature examining how individual leaders shape foreign policy — something that captured my imagination in graduate school. Where my analysis intersects with this approach is recognizing that when institutions tear away the connective tissue between leaders and the bureaucracy, foreign policy increasingly shows the leader in absolute terms. This isn’t necessarily beneficial — that’s the twist my book offers. Only when institutions incorporating bureaucratic perspectives are established do outcomes begin to look substantially different.
Jordan Schneider: Let’s conclude with Xi. We discussed the post-Xi era, but let’s talk about Xi himself. How is he handling all this?
Tyler Jost: We should be even more cautious about drawing inferences regarding Xi than with Trump because the information environment is quite poor. I’ll make two points.
First, I’m reasonably convinced Xi Jinping inherited those middle-ground siloed institutions I described — the hub-and-spoke model where information reaches the leader but with limited horizontal sharing between bureaucratic actors. This conclusion stems partly from the system’s own statements justifying institutional changes they implemented, such as establishing the National Security Commission early in Xi’s first term.
Some argue that these institutional reforms solved all problems, but I’m skeptical for several reasons. The National Security Commission essentially renamed its predecessor, the National Security Leading Small Group, signaling Xi’s political power — similar to Joseph Torigian’s argument about Deng Xiaoping pushing for war with Vietnam as a power demonstration. But the composition of these groups didn’t change substantially. Additional staff may have been added, but public reporting indicates the National Security Commission has focused more on domestic issues than international security problems.
What made the system “siloed” when Xi took office was primarily the segregation of military decision-making via the Central Military Commission from the civilian bureaucracy. That division between these two systems remains the most prominent feature of what Xi inherited. His response hasn’t been to integrate the military with civilian bureaucracy at lower levels. Instead, he appears to have doubled down on direct, unilateral control of the military through the Central Military Commission. This gives him more control but at a cost — it allows the military to channel information directly upward without vetting by other bureaucratic elements.
Second, we might ask whether the system has deteriorated under Xi. Unlike the Cultural Revolution, where systemic changes were obvious to outside observers, the formal structures of decision-making haven’t undergone a dramatic transformation. However, the dismissal of minister-level positions in the Foreign Ministry and military apparatus operates at a different level — focusing on personnel rather than institutions. This likely creates a chilling effect. Lower-level bureaucrats report fear of speaking truth to power, which isn’t surprising.
We must be careful about these inferences, though. Most indications of the chilling effect from Xi’s anti-corruption campaign and personnel decisions come from very low levels. What remains unclear, at least publicly, is how the bureaucracy interacts with political leadership — the primary focus of my book, which argues this is the most important area to examine. We don’t know if the same fear of speaking truth to power shapes those higher-level interactions. It may be some time before we can conclusively characterize decision-making under Xi’s system.
Jordan Schneider: From a Western policymaker perspective, given these new uncertain variables about how information travels upward, what should officials be thinking or doing differently if they might be in this complicated situation rather than a clean information environment?
Tyler Jost: This is an important question with both assessment and strategy components — what we should think and what we should do.
On the assessment side, we should incorporate into our calculations the possibility that Beijing may develop a completely different perspective on the international environment. This could result from Xi Jinping’s independent judgment or from judgments based on the information presented to him, combined with his personal understanding of the situation.
Regarding strategy, the challenge is substantial. It requires a two-step approach: first, identifying early signs of misperception forming on the Chinese side; second, attempting to correct that misperception. However, if the institutional structures themselves are causing China to develop misperceptions, then direct interaction with the leader may be the only effective channel for shaping their worldview.
If the bureaucracy won’t transmit quality information for any of the reasons we’ve discussed — whether related to personnel, institutions, or other factors — then lower-level interactions won’t be effective. Military demonstrations, actions in the South China Sea or Taiwan Strait, export controls — all these signals get filtered through the bureaucracy in ways that may prevent belief changes at the top. This forces us to consider that altering beliefs on the Chinese side might require direct interaction with the Supreme Leader, making face-to-face diplomacy one of the few means available to meaningfully influence the situation.
“We Were Wrong, Terribly Wrong”
Jordan Schneider: Tyler, across all your case studies, is there one moment or meeting you wish you could have witnessed firsthand?
Tyler Jost: Probably all of them. There’s the meeting in fall 1961 with Nehru and his advisors, where foreign policy was pushed to its limit. There were meetings in January, February, and March in Beijing between Mao and his subordinates that led to the Sino-Soviet border clash.
There’s also January 29, 1965 — the date when the “Fork in the Road” memo was drafted primarily by Bundy and McNamara and delivered to LBJ. I believe they met that same day. While different theories exist about the true turning point of the Vietnam War, my personal assessment, as presented in the book, is that this was the decisive moment. It would have been fascinating to witness these meetings firsthand.
Jordan Schneider: Can we discuss how terrible that memo was? It was high school-level, B-minus work. It’s embarrassing.
Tyler Jost: What’s interesting is that, unlike the Iraq War generation of American leaders who maintained until their deaths that they did nothing wrong, the Vietnam era advisors were deeply troubled by what happened. McNamara states in his memoirs that, “We were wrong, terribly wrong.”
The body of a US paratrooper killed in action in the jungle near the Cambodian border is lifted up to an evacuation helicopter, May 1966. Source.
McGeorge Bundy, who didn’t publish memoirs but left a draft available in the Kennedy Library in Boston, makes two points. First, he acknowledges that communism in Asia could have been contained at much lower cost than the escalation in Vietnam — undermining the rationale that motivated him. Second, he identifies his greatest mistake as National Security Advisor as the shallowness of analysis he provided to LBJ, which is remarkable since that was his primary responsibility.
Bundy understood this was his job, particularly from his years with Kennedy. However, Johnson’s choices made it difficult for advisors like Bundy and McNamara to perceive the situation accurately. Bundy, in particular, was a hawk, so Johnson’s system allowed the analysis to excessively reflect Bundy’s personal perspective. This bias is evident in both the memo we mentioned and in several others Bundy wrote the following month, most notably after the attacks at Pleiku.
Jordan Schneider: It’s fascinating that these Vietnam era officials didn’t gaslight us, while the Iraq War ones maintained their positions until death. My assumption is that the independent variable is 58,000 versus 4,000 American military casualties. There’s an undeniable truth to that number and a shock to the societal fabric that might not have seemed as important when compared to Korean War, World War II, or World War I death tolls.
Vietnam crossed a threshold of public awareness in the US.
That factor, combined with the definitive way the war ended, made a difference. By the time Rumsfeld died, we had ISIS in Iraq, but the outcome remained somewhat unresolved, unlike in Vietnam where the Viet Cong clearly took over the country.
Tyler Jost: You should consult some of my colleagues who have studied the Iraq War in depth. This comparison between Vietnam and Iraq officials is an interesting point about the independent variable. I’ve used this comparison multiple times without explaining the difference. What strikes is how unusual it is for advisors to admit they made mistakes in the decisions they were most responsible for. This tells us something important was happening in the lead-up to Vietnam.
Of course, other explanations exist. There are more self-interested interpretations where they might have been trying to salvage their reputations. At certain points in his memoir, McNamara’s analyses about why they were wrong seem completely misguided. For example, he claims the US had extensive expertise regarding the Soviet Union but none regarding Southeast Asia. This is objectively false.
The problem wasn’t a lack of experts in the State Department or National Security Council. The problem was that when these experts wrote memos to be sent to the President, officials like McNamara blocked them, saying, “No, absolutely not. This isn’t going anywhere.” McNamara did this for specific reasons, and we can understand why he acted as he did.
Tragedy appears in the opening lines of my book. These events are tragic and with the benefit of hindsight, one wishes things had been different. The cold reality is that these outcomes are so firmly rooted in politics that even if we hope decision-makers would rise above such forces, politics remain powerful enough to ensure these patterns will continue perpetually as a result of contestation between political actors.
Jordan Schneider: Let’s close with your opening lines then:
“One of the tragedies of international conflict is that it often achieves so little. History is replete with examples of states charging headfirst into international confrontations that left them no better off and often much worse off than where they started.”
Rob Lee, a former Marine and Russia expert at FPRI, has spent significant time on the frontline in Ukraine. He joins Shashank Joshi, defense editor of The Economist and of Breaking Beijing and our newly minted Second Breakfast podcast to discuss the war in Ukraine, technology on the battlefield, and the future of warfare.
Today, our conversation covers:
Whether Ukraine represents a revolution in military affairs and what lessons the war holds for other theaters
Why 80% of casualties in Ukraine are caused by UAVs,
The limits of FPVs and UAVs, tactics to counter UAV attacks, and the role of unmanned ground vehicles,
Institutional friction within the Ukrainian forces,
How Chinese components and commercial drones from DJI are shaping the battlefield.
Drone incidents over Europe, burden sharing, and what NATO is learning from the war,
Plus: what music Ukrainian soldiers are listening to on the battlefield.
Jordan Schneider: A defense-tech talking point is that 70% of casualties on the battlefield today are caused by drones. Rob, what should we make of that?
Rob Lee: We should question statistics when they don’t have a clear source, because they anchor our views of modern warfare. Are the percentages authoritative? Are they replicable in other conflicts?
I visited the front line in Ukraine last summer and spoke with more than 15 battalion and brigade commanders, or their intelligence officers (S-2s). I asked each the same question, “What percentage of current casualties are from Unmanned Aerial Systems (UAS)?” 80% was the most common answer, with a range of 75-95%. This is the number cited by senior Ukrainian officials, like Pavlo Palisa.
Artillery and UAS are complementary, so it’s hard to distinguish between them. In many cases, artillery is important for destroying tree lines, which allows UAS to drop grenades on exposed troops. Artillery also helps to canalize Russian units — Russian infantry avoids open fields, sticking to tree lines. UAS can then drop mines to funnel them in a specific direction — there’s a profound psychological effect of having a 155mm or 152mm shell land near you. Artillery isn’t obsolete. Commanders of elite UAS units said that although UAS cause more than 50% of casualties, they do not operate in isolation, and artillery plays a key role.
I think 80% is a decent estimate for the majority of casualties on both sides. It’s impossible to know the exact number. I would caveat that brigade commanders do not see all casualties — some are outside their direct command. They also do not see all Russian casualties from HIMARS strikes, for example. This high percentage also shows Russia adapting to infiltration tactics — they often move only one or two soldiers at a time. Using artillery on a single soldier doesn’t make sense, it is more efficient to use a First Person View (FPV) drone or a Mavic to drop a grenade. 80% is a good estimate.
This number is dictated by the nature of the fighting in Ukraine — the infiltration tactics and the prevalence of dismounted, small-scale infantry assaults are why UAS play an outsized role. In large-scale dismounted infantry assaults, artillery is the main killer. I spoke to the Deputy S2 for a battalion fighting North Koreans in Kursk. He said that during the first days of the North Korean assault, so many Russian Intelligence, Surveillance, and Reconnaissance (ISR) UAVs flew overhead, the Ukrainians couldn’t use their own artillery effectively. Once that changed and they could use artillery again, they inflicted heavy casualties on the North Koreans, forcing them to shift from platoon-sized attacks to smaller, squad-sized units.
Keep in mind, in the next war NATO fights, UAS may not cause 80% of casualties. In a large-scale, conventional war, artillery would likely be the main killer, at least initially. Things have changed dramatically since the 2022 invasion. A brigade commander estimated that in the summer of 2023, artillery caused 90% of casualties. He now believes 80% are from UAS. That shift is important. It is important to ask how this will apply to future conflicts.
Shashank Joshi: We saw an essay a couple of months ago from General Zaluzhnyi, who was the commander-in-chief of Ukraine’s forces. He’s now based in London, away from the front, so take his views with a pinch of salt. In his office, there are banks of video screens where he watches drone strikes from Ukraine. He’s still digitally plugged into the front.
In his essay, he supports the 80% figure and writes that traditional means of protection, like fortifications, armor plating, and even individual body armor, are negated by the scale, lethality, and accuracy of modern UAVs. Someone with a bird’s-eye view of the conflict reached that conclusion.
I agree it’s a mistake to cite that figure without considering the role UAVs play in other operations. Even with artillery strikes, the observation is going to be facilitated by UAVs. I see UAVs and artillery as symbiotic means of firepower, or nearly symbiotic. It would be a mistake to ignore that context.
Tony Stark: Are we talking about catastrophic kills or disability casualties? What is the modern FPV capable of in terms of disabling and disrupting enemy operations?
Rob Lee: Employing armor is very difficult, and UAVs are the main problem. Early in 2023, FPVs were overhyped — they were a new, immature technology. How to employ them wasn’t clear — there weren’t many available radio frequencies, so you couldn’t use many in proximity to each other without signal interference — and there were other issues. FPV capabilities have since matured, and crews are now experienced using this technology.
For vehicle losses, it depends. For units that fought at Kursk, repelling Russian assaults from both the Russian Airborne Forces and Naval Infantry, Javelins played a big role. This is surprising because Javelins have a greater risk at an accurate range. Armor assaults are uncommon now. We are seeing some in the eastern direction where overcast weather limits the ability of ISR UAVs to fly, and Russia is trying to take advantage of that before winter. But many vehicle losses are due to UAS — a combination of remote mining, FPVs, or night bomber UAS.
Social media can be distorting. One of the best night bomber UAV units in Ukraine is the Lasar Group of the National Guard. They have about 90 crews, are extremely well-led, and have a very efficient targeting cycle. According to their internal data, they’ve damaged or destroyed 2,000 tanks and more than 3,000 BMPs or BTRs, and a large number of artillery systems. They mainly operate at night because UAVs are easier to shoot down during the day. Their success has pushed Russia to keep its tanks further behind the front line at night. In June, they destroyed more artillery than the top four or five UAV units combined. But you do not see this because they aren’t posting footage.
For armored assaults, more than 50% of losses are from FPVs or mines dropped from UAVs. Anecdotes are important here. In May, the 20th Mechanized Brigade faced two turtle tanks — well-made by former Wagner fighters. The brigade told me it took more than 60 FPVs to stop those two tanks, and the first tank wasn’t even stopped by FPVs but by its own gearbox, which exploded. The UAV commander said if that hadn’t happened, the tank would have made it to their front line — it was that well-built. There’s a video of the tank afterward with a lot of FPVs stuck in the external wiring, none of which stopped it. The vast majority of vehicle and infantry casualties are from UAS.
Tony Stark: There is a discussion about battlefields becoming more transparent with modern technology. I’m not sure I agree. How do you conduct surprise at the tactical and operational level, given those circumstances?
Rob Lee: The last time there was an operational surprise was the Kursk offensive. The Kursk operation is interesting for a bunch of reasons, but the operational security was very tight. My understanding is that General Syrskyi led it himself, taking direct command. The brigade commanders had to sign non-disclosure agreements — they weren’t allowed to tell their superior command that they were moving to Kursk.
The reconnaissance was compartmentalized. There are a lot of lessons for us about how to conduct such an operation, but also what you can and can’t tell subordinates before an offensive. Most of the soldiers who were moved to Sumy thought they were defending, not preparing for an offensive operation. That was the last time we’ve seen a real breakthrough. At the time, Russia didn’t have strong UAS capabilities in the area. The Russian units there were not well-trained — they were conscripts. They had built good fortifications, but they weren’t tied into a coherent defensive system.
Since then, we’ve not seen an offensive breakthrough or much success on either side. Ukraine has made some attempts — in March, there was an operation in Belgorod to relieve pressure on Kursk. In April, they conducted an operation towards Kursk with some of their best assault units, including the 225th and 425th assault battalions, and ran into substantial issues there. Without the element of surprise, success is difficult.
Neither side can achieve air superiority or effectively leverage aviation to set the conditions for breaching well-fortified defenses. My view is that success depends on degrading, suppressing, and destroying UAS teams. The reconnaissance and fires aspects are also key. Both sides are prioritizing those, but neither has successfully set the conditions to take more than a village or launch a small-scale tactical assault.
Modern communication technology also complicates the situation. Everyone has a cell phone — you can’t really prevent people from having them, so you have to plan with that in mind. Both sides know their soldiers will call home — both sides have signals intelligence capabilities and listen in on those conversations.
Commanders sometimes lie to their soldiers, saying, “We’re getting rotated off the front line, we’re going this direction,” to misdirect their adversary. Both sides are using deception tactics.
Jordan Schneider: Why don’t they ban cell phones then? Are cell phones necessary for communication, or is it that in 2025, you can’t send someone anywhere without one?
Rob Lee: Cell phones are used for military communications — probably too often — and this is true on both sides. If you go to a command post, you’ll see Discord and Google Meet open. I know soldiers who use Google Meet to talk to a drone pilot during a firefight. On the Russian side, Telegram is often used to overcome their internal communication problems.
Both sides are scaling up their Signals Intelligence capabilities. I do not know enough to speak intelligently about it, but it’s clear they pull a lot of data. A big priority now is figuring out how to sift through all this data quickly and make it actionable. That will be a major focus of AI and machine learning development for the military — how to turn raw information into intelligence.
Shashank Joshi: The cardinal principle has always been that it is easier to persuade an adversary of what he already suspects than to introduce a new idea. We saw this in the planning for D-Day and the Normandy landing. A key element of the Kursk offensive was the ruse that Belgorod was the real target — that deception boosted Ukraine’s chances.
Deception is a fascinating topic now because it is difficult to pull off in the modern world. Creating false chatter on your comms is an age-old technique, but you have to maintain the deception across all channels of communication. You have to make the Belgorod operation appear real in every way.
On a tangent, Jordan, I know you read widely. R.V. Jones, the wartime British scientist, wrote a great book, The Wizard War.
Jordan Schneider: Oh, what a classic!
Shashank Joshi: He gave a lecture at CIA headquarters in 1993 called “Some Lessons in Intelligence.” It’s a fantastic reflection on the nature of modern deception, taking lessons from World War II and considering how to apply them to new conflicts. I encourage everyone to read it.
Where is the Frontline?
Jordan Schneider: Rob, Michael Kofman asked you where the drone swarms are? We’ve now seen soldiers using Xbox controllers to guide drones — it seems like many of these roles could be automated in 5, 10, 20 years. You and Shashank wrote that infantry stationed on the front line for 200 days were instructed not to shoot enemy soldiers crossing their positions. If that’s true, then why are they even there? So, why are humans still sent to the battlefield? From what you’ve seen, which roles will be automated first, and what tasks will still need a person on the ground?
Rob Lee: I’ve been hearing people say we’re going to have swarms “this year” for the last two years. There is a Ukrainian company called Swarmer working on this — the Wall Street Journal wrote an article about them a few months ago. I do not know the full extent of their success. There is often a lot of talk about AI in a swarm, but “AI” is often a misnomer. In many cases with FPVs, there’s a form of terminal guidance where, once the camera is on something, you can click a button and it will more or less follow the target. That will mitigate the loss of the video feed. I wouldn’t call it AI, but some people do.
I know there are attempts to improve a UAV’s ability to read terrain and target on its own, without a human in the loop. I think the goal is being able to send a UAV into a grid square and have it locate targets on its own. I do not know how soon that will be. In some ways, it’s less important for Ukraine right now because they are mostly targeting Russian infantry, one or two guys at a time. You do not need sophisticated AI for that.
I do not think we should assume infantry will be obsolete anytime soon. You still need someone on the ground to hold territory. It is an interesting point about Ukrainian infantry being told not to engage unless they have to. It calls into question what they actually hold — what is the front line? How real is it? Are these soldiers an observation force, even though they aren’t fighting all the time? I’m not sure how to describe their role.
One of the problems recently is that the maps we use for Open Source Intelligence are increasingly less accurate. This is not because the cartographers are worse, but because with infiltration tactics — where soldiers are walking 10 kilometers past the front line — it’s unclear what a geolocated reference point means. Does it mean they’re holding the point? Does it mean they just dropped a flag there? The Russians will drop a flag from a UAV and post it publicly so their commanders will think they have advanced further than they did.
One thing we’ve seen throughout this war, as in most wars, is a constant innovation, countermeasure, adaptation cycle. There is a lot of work on creating mesh networks and on creating UGVs and UAVs that can operate and bounce signals off each other. Some people are skeptical of that. Part of the issue in Ukraine is that only a few companies, like Silvus, make radio signals that are strong enough to create a mesh network, and they’re expensive and only available in low quantities, making it cost-prohibitive. There are other adaptations, like using cell towers near the front line to improve 3G connections.
Using UAVs and Unmanned Ground Vehicles (UGVs) is still a manpower-intensive activity. An FPV team is normally four soldiers, and you have to constantly rotate them out. UGV teams may be larger. When Ukraine conducts an assault, the task organization for a 4-8 man assault group will include an FPV team, a night bomber UAV team, and two Mavic teams in support. That’s four UAV teams supporting a 4-8 man infantry team. The ratio of UAV operators to infantrymen in those cases is 2-to-1 or 3-to-1. One of the big questions going forward is what that ratio should look like for us. It’s not clear what the perfect ratio is. It’s also difficult because Ukrainian brigades are mostly defending. They’ve been defending for two years, few units have recent offensive experience, and the technology keeps changing. Assault units are compensating by fielding more UAV operators than infantrymen in operations.
Jordan Schneider: Why does it take four people to run a drone team? And why can’t the pilots be a thousand miles away?
Rob Lee: The pilot can be a thousand miles away. That’s one of the unique things. Operation Spiderweb was conducted by pilots in Ukraine, hitting targets all across Russia. The Lazar group’s pilots operate from Kyiv to deploy the drones to the front line, hundreds of miles away. In reality, we could have pilots in America piloting UAVs in Ukraine right now if we wanted to, though there would be some interesting legal implications. We’re moving in a direction where pilots can operate far from the front lines.
For FPVs, it’s typically a team of four because they deploy relatively close to the front line. You have to have someone deploying the UAV somewhat near the front. One person will be an engineer in charge of the munitions — depending on the target, you want to use a different munition, and you have to know how to use the initiator properly. A lot of people have lost hands or been killed by improperly assembling FPVs, as many munitions are homemade. So, one person is an engineer. The pilot and co-pilot roles are interchangeable, but the co-pilot often navigates. You’ll often have a fourth team member flying a Mavic to spot the target and talk the FPV onto it. It could even be more than four people. You might have one person managing antennas, and another as a driver. They often have to walk the last two or three kilometers to their position without a vehicle, so you need enough people to carry all the equipment.
With UGVs, maintaining communications is difficult. You often have to have a UAV acting as a repeater for the signal to the UGV. You also need the UAV for the pilot to see, because looking from the UGV’s camera on the ground, you do not see very much. You also need a maintenance person and other support. Ukraine is looking at creating UAV battalions in all its brigades. They’re forming UGV companies that might become battalions. We’re talking about hundreds of people. The task organization and the table of organization for these units are changing, and it’s going to have to change for our military as well.
Shashank Joshi: When we talk about swarms, people often think a swarm is a lot of UAVs all at once. That’s not what it means in a technical sense. A swarm is when each UAV is communicating with the others — there’s a degree of coordination within the group. The technical case for this is clear — you can overwhelm an adversary and also minimize the amount of pilot involvement. Imagine a single pilot able to select a target and launch hundreds of UAVs that can then autonomously approach it.
We have missiles that can do this. The Brimstone missile, that the UK has provided to Ukraine, is an example. Ukraine fires them off trucks, which I’m not sure the UK is even capable of doing. Those Brimstone missiles, which were designed about two decades ago, can each observe what the other is doing. If one missile picks a tank, another missile in the swarm can pick a different tank, so you’re not wasting munitions on the same target. That’s the fundamental appeal, along with saving pilot capacity.
The problem is that physics is a thing. If there is intra-swarm communication, how is that message being sent from one airframe to another in flight? Typically, there will be some kind of radio signal. It may not be subject to the same jamming as the main control signal because it will have a different frequency and strength, but you still have to send these signals between drones that are close to one another. When you get to a large number of UAVs in flight, there is more interference, and you struggle to send signals. This is a problem with all uncrewed systems — theoretical capabilities are different from practice. The simple issue of getting messages to and from the drone is at the heart of the operational limitations.
Rob Lee: Weather also plays a bigger role for UAVs and UGVs than it does for artillery. It is a consistent problem, including for the Starlink systems used in many of these UAVs. As Shashank is saying, there are so many basic problems that come up that make this much more difficult than people imagine.
Tony Stark: Autonomy on the battlefield is an iron triangle between capabilities, cost, and survivability. Capabilities include both effectors and sensors, as well as computing power. Cost includes not only the price of a single system but also industrial scaling. Survivability isn’t just about surviving enemy fire, but also about resistance to dust and required maintenance. Trying to get that equation right in a swarm is really hard. You can have effective, jam-resistant means of communication, but that also makes the swarm cost more than you want at a tactical level. When you actually see a swarm on the battlefield, it will be because someone has solved that equation.
Jordan Schneider: Or solved it for a point in time until the adversary adapts. The underlying question is whether we’ve lived through a revolution in military affairs. Even if advanced AI can replace pilots, you still need someone nearby to set up the system — drones can’t fly that far without trade-offs.
Shashank Joshi: When you’ve made a system that has a long range, can operate in all weather, is jam-resistant, can communicate with other aircraft in a swarm, and has a large payload to cope with up-armored defenses — congratulations, you’ve invented a cruise missile. You can do it cheaper than existing cruise missiles, but at that stage, you have only invented a very decent cruise missile.
Tony Stark: I saw a video over the weekend of a Ukrainian soldier being evacuated by a UGV. I’ve heard reports of this for a while. As a former infantryman, the idea of an unaccompanied wounded soldier being evacuated by a UGV makes me uncomfortable, but I understand operational necessity. How common are UGV evacuations? Is that the best use for them right now? How does it compare to other applications?
Jordan Schneider: Is a UGV a ground robot that can walk like a dog, or is it a little truck?
Shashank Joshi: Normally, they trundle along on treads instead of ambulating.
Rob Lee: UGVs have become a significant focus for Ukraine this year, primarily to offset their shortage of infantry personnel and reduce casualties by taking over dangerous missions. Roughly 90% of UGV missions are logistics — last year, probably 70% or more of UGVs were procured for this purpose. Some units that invested in this technology early, such as the 3rd Assault Brigade and the Khartia Brigade, are more experienced in their use, but adoption is becoming common across all units.
UGVs excel at transporting heavy equipment — up to 300 lbs of ammunition, food, and water. They can carry items that are too heavy for UAVs, such as a .50-caliber machine gun. This ground-based logistical support complements the use of night bomber UAVs, like the Vampire drone, that were previously the main method for resupply. Now, it is common for the engineer sections within Ukrainian brigades to operate both UGVs and night bomber UAVs to support their battalions.
While UGVs have been tested as remote weapon systems, their use in direct combat is challenging. The camera often shakes, making it difficult to aim, and an observation drone is usually needed overhead to confirm where rounds are landing. More critically, signal loss is a frequent problem. UGVs are vulnerable targets — they’re smaller than a truck, but big enough to be easy targets, and Russian forces constantly hunt them with FPV drones. Both sides heavily target roads and supply routes, and any vehicle spotted — be it a truck, an infantry squad, or a UGV — will be attacked. UGVs are often hit.
UGV casualty evacuations are becoming more common, though I’m not sure of their scale. Many brigades reserve this function for extreme situations where the UGV is the only viable option, such as reaching a wound that cannot be treated at the front line or accessing positions that are nearly impossible to get to otherwise. There are reports of soldiers with catastrophic injuries, including lost legs, remaining at the front for days or weeks before evacuation is possible.
The main risk for these missions is signal loss. A disconnected UGV can leave a wounded soldier stranded, alone on the battlefield. There are videos of Russian FPVs striking UGVs during an evacuation and then dropping grenades on the wounded soldiers, highlighting the danger of these missions.
The fundamental challenge for all UGV operations is maintaining a stable signal. Unlike UAVs, which operate high in the sky with a clearer line of sight to their antenna, UGVs are on the ground where the Earth’s curvature, terrain, and obstacles consistently interfere with the signal. To overcome this, operators often need a UAV to fly overhead and act as a signal repeater. Some UGVs are equipped with Starlink for satellite communication, but Starlink doesn’t work under tree cover or in forests. These necessary redundancies make operating UGVs more complex and expensive.
Successful UGV deployment requires more meticulous route planning than for UAVs. The operator must balance the need for concealment from enemy drones with the need to maintain a clear signal, as the very features that hide the UGV can also block its connection. While some units deploy ground-based signal repeaters from elite manufacturers like Silvus, this is a costly solution limited to specific areas. Ultimately, a UGV’s effectiveness is limited not by its battery life, but by its signal range, which is shorter than that of a UAV.
There is a significant need for a terrain-mapping system that would allow UGVs to navigate autonomously, but this technology is underdeveloped. For now, their applications are mostly logistics, with some casualty evacuation and limited remote weapon use. Mine-clearing and demining are also valuable roles for UGVs. Additionally, they are used as “kamikaze” drones; some small units are used for this purpose, but in more extreme cases, UGVs have been loaded with 500-pound aviation bombs and driven into targets like bridges to destroy them.
Europe’s Homework from the Battlefield
Shashank Joshi: These systems are being used extensively elsewhere — the Israel Defense Forces (IDF) have used them in Gaza. For them, it is an easier task, as Gaza is a much smaller piece of ground — the entire territory would represent a minuscule patch of the Ukrainian front line. That makes visibility and communications easier. The IDF has used UGVs for a variety of missions, patrolling, sentry duties, setting explosives to breach targets, and the long-standing UGV task of mine and bomb clearance. Ukraine isn’t the only testing ground where we are seeing these developments.
Tony Stark: How many of these lessons are European allies and the American military absorbing? The US seems willing to adopt only the convenient lessons. How much does this translate into budget and policy changes, rather than just a discussion in military schoolhouses?
Shashank Joshi: We need to ask two questions. First, whether we are living through a true revolution in military affairs or seeing incremental changes that, while tactically important, are not a transformation of warfare. Second, which lessons from Ukraine are relevant to other conflicts, and which lessons are unique to Ukraine? These debates are ongoing, partly because we do not know the context of the next war, but also because the answers themselves are unclear. Different observers reach different conclusions.
At the tactical level, the British are in an interesting position with regard to Ukraine. Like the US, they have supported Ukraine at the theater and strategic levels, helping train and advise Ukrainian forces from European headquarters and maintaining a close relationship with the Ukrainian high command. But British forces have been tactically involved inside Ukraine to an extent that the US hasn’t. When I look at British Army training and doctrine, I see an effort to absorb lessons from Ukraine on force organization, the structure of squads and companies, and how to build more effective “kill webs” in an environment of constant surveillance.
The UK is still reluctant to adopt the Ukrainian model of warfare. Admiral Sir Tony Radakin, the UK’s Chief of the Defense Staff, said, “We would not fight like Ukraine. The British way of warfare is rooted in an expeditionary and maneuverist mindset.” He has suggested the UK would prefer to fight like Israel, citing the Israeli attack on Iranian sites using long-range air-launched missiles.
Jordan Schneider: Everyone would like to fight that way.
Shashank Joshi: That’s the criticism. You may not be interested in positional warfare, but positional warfare is interested in you.
Last summer, the British Defense Review stated that ~10% of new spending should go toward innovative projects. A source involved in that review later regretted its vagueness, because it allowed existing systems like the F-35 fighter jet and attack submarines to be mislabeled as “innovative capabilities” — the exact interpretation the authors wanted to avoid. The lessons from the Ukraine war are part of an ongoing intellectual debate. There is no consensus on new ways of fighting, or different equipment and spending patterns.
Jordan Schneider: Describing it as an “intellectual debate” is generous. The real question is whether you are being serious about it. What would be your barometer for gauging if institutions are responding to this war with appropriate seriousness and first-principles thinking?
Shashank Joshi: If you look at what NATO does, you do see lessons being learned. For example, NATO has contracted Palantir to build the Maven Smart system, a digital targeting web that can fuse intelligence from different sources. It is a command and control system that brings us closer to the vision of “any sensor, any shooter” that we’ve discussed before.
General Chris Donahue, head of Allied Land Command, is developing the “Eastern Flank Deterrence Line,” which invests in low-cost interceptors and firepower and merges them into a Ukraine-like system. But they’re concerned that current UAV systems may be obsolete in 18 months — should they buy today’s models or wait for tomorrow’s? NATO thinks it needs to invest in the command and control systems that allow it to deploy UAVs most effectively.
For me, the true test would be if armed forces are running exercises, simulations, and modeling that test a wide range of scenarios. If Ukrainian officers visit these exercises and recognize elements of their own fight, and see it as a serious effort, that would be a measure of success.
Jordan Schneider: The split screen in my head is that we need to have less DEI and more warrior culture and to start a war with Venezuela. Thoughts on all of this?
Rob Lee: According to my contacts in the US military, they are trying to learn from Ukraine. I’ve noticed younger service members often see developments in Ukraine on social media platforms like Twitter and Telegram. Older senior generals are less plugged into this open-source information and may be missing key developments, like the role of FPVs.
European countries are making this a priority. The UK is focused on it, and I hear Denmark is as well. The Baltic countries know this war is directly relevant to them. But there are legitimate questions about how these lessons apply to a different kind of war, such as one against China in the Asia-Pacific, which is the US Marine Corps’ focus.
For European defense, if Russia is the main threat, then Ukraine is the ultimate teacher. Ukraine demonstrates daily what is and isn’t effective against the Russian military. The sense of urgency in Ukraine, that exists nowhere else, drives adaptation. There is a lot we should be learning, including that FPVs are here to stay. Other low-cost adaptations, like using a small number of helicopter crews to shoot down thousands of Shahed drones with a significant success rate, are things we should at least be practicing. Ukraine is doing this for a reason.
Russia also keeps adapting and innovating — scaling up its UAV force and creating an unmanned systems force. Elite units at the Rubicon Center, a very effective organization, are responsible for all unmanned systems development — UAVs, UGVs, and naval drones. They have at least eight or nine combat detachments in Ukraine and are constantly spreading lessons and innovations, and using analytics to inform their research and development. This unit is a priority for funding and personnel. The Russian military we see in the future could look very different from 2023.
The innovation cycle in Ukraine is very quick, and both sides are learning. Anytime Ukraine develops an adaptation, Russia copies and learns from it faster than we do because the lessons are more painful for them. I guarantee you, Russia learned more from an embarrassing operation like “Spiderweb” than we did. They’re probably already thinking about how to conduct a similar operation against European countries. In some ways, any new Ukrainian innovation eventually becomes a threat to us, because Russia will learn from it and could apply it against NATO. There’s a tremendous amount to learn, but countries are learning.
Jordan Schneider: We’ve now seen drones fly over airports all over Europe, which is an alarming development. I remember shortly after it happened, you said on a podcast with Mike Kofman that everyone should be aware that this could happen anywhere in the world. It’s shocked me that there isn’t a sense of urgency, at least in America, to install drone defense systems around airports or elsewhere. Shashank, are you surprised Putin’s play hasn’t triggered more concern? Describe the response so far.
Shashank Joshi: There’s a genuine attribution problem here and an intelligence gap. When you speak frankly with officials, they suspect the drones in Europe were Russian activity, but for the drones on the US East Coast last year, they also believe an element of mass hysteria was involved. Distinguishing real threats from false alarms is difficult.
Two weeks ago, I interviewed Mark Rutte, the Secretary-General of NATO, and pressed him on why they could not confirm these drones were Russian. It became clear that they do not know. The official line is that the investigation is ongoing. This suggests one of two possibilities, either the intelligence is so highly classified that they can’t publicly attribute the drones to Russia — rendering the information useless because it can’t trigger a public response — or there is a genuine lack of intelligence.
Another factor is that even if you suspect the drones are Russian, you have to be very careful about shooting them down. As we speak, the British Defense Secretary is loosening the rules of engagement to allow more shoot-downs of drones over military bases. But, imagine if downed UAVs fell on a village or a vehicle, killing or injuring civilians, it would be a political scandal 10x worse for the minister in charge than the fact that a hostile state flew a surveillance drone over a base. The political incentives are a major constraint.
There’s also an economic problem — how do you develop cost-effective interceptors? How can you shoot down enough drones without depleting the stock of interceptors needed for wartime? This is less of a problem for a few quadcopter sightings over a base, but it is a critical concern for decoy drones flying into a country like Poland. You can shoot down one or two, but expending your entire stock of air-to-air missiles on these drones is a strategic win for the Russians. We desperately need an alternative solution.
I am seeing those solutions emerge in the form of low-cost interceptors designed by various companies, as well as other means of interception, including directed energy. Progress is being made. But this isn’t only a technical problem; it’s also a problem of political incentives.
Made in China Neutrality
Jordan Schneider: When you are talking to people on the front, does China come up? Is it a relevant variable in their calculations? Are they annoyed or confused about China’s role in the conflict?
Rob Lee: The UAVs — either as complete systems or components — are mostly coming from China. The DJI Mavic is arguably the most important UAV in this war, particularly the Mavic 3, the Mavic 3T, and now the new Mavic 4 line. Autel, another Chinese company, also produces common quadcopter-type UAVs. These drones are used for reconnaissance and for dropping grenades. They’re cheap, costing only a few thousand dollars, and the Mavic 3T, with its effective thermal camera, is the main reconnaissance system for nighttime operations.
A critical technical step for Ukraine is that they have to hack, or “jailbreak,” the firmware for every Mavic they use. The standard DJI software reveals the operator’s location — this feature needs to be disabled before use on the front line. The Ukrainians report that the Russians receive their Mavics pre-jailbroken from China, whereas Ukraine has to do it themselves for every Mavic. In March, Vadym Sukharevsky, commander of Ukraine’s unmanned forces, estimated Russia had a 6-to-1 advantage in the number of Mavics, which he considered significant. The supply of drones is a major issue. A Ukrainian brigade commander in the Pokrovsk area told me that the biggest problem for adjacent units was a lack of Mavics, even more so than ammunition shortages.
China is also the source for fiber optic cables, with supplies reportedly increasing significantly this year. These cables can be used to make FPV drones immune to electronic jamming, which is a key advantage. Russia is also operating several new UAVs, such as the Garpiya — a knockoff of the Shahed drone — and other modern kamikaze drones like the VTU, which are built with Chinese components.
While China isn’t providing direct military equipment like ammunition, its role in providing dual-use technology is a major advantage for Russia. Ukrainian commanders know they’re at a disadvantage because Russia can procure these systems from China so easily. Ukraine also sources engines and other components from China, but its procurement process is more difficult. While China hasn’t provided direct military aid, given the dominant role of UAVs in this war, its support is an important factor.
Jordan Schneider: China’s Foreign Minister, Wang Yi, reportedly told some European diplomats, “If we were actually supporting Russia, this war would have been over years ago.” Shashank, what are your thoughts on that comment?
Shashank Joshi: He is being cocky — raw industrial capacity alone is not the recipe for victory. But there is a kernel of truth to his point. We spend a lot of time analyzing what China is giving Russia and how close it’s come to providing direct armed support. On certain systems, such as armed UAV designs, China has arguably crossed that line. Even if China isn’t transferring the explosive payload, it’s transferring UAVs designed to be armed. But it isn’t happening on a decisive, war-winning scale compared to what Russia is producing itself — it’s a niche capability.
There was a moment in this conflict where Russia could’ve been in a more difficult position. Had the Ukrainians been able to press their advantage in late 2022, or if the 2023 offensives had gone differently, Russia could’ve been in serious trouble. I think if the Russians had been facing a potential collapse, China would’ve been more likely to step in. They had the stockpiles and the industrial capacity to fill many of Russia’s needs for basic artillery and other systems.
The reason they didn’t is twofold. First, the threshold for engaging was very high because it would’ve meant blowing up their relationship with Europe, which the Chinese want to protect. If they were going to take such a drastic step, it would’ve to be out of necessity, and it was not necessary. We know the Russians gave wish lists to the Chinese early in the conflict, and the Chinese didn’t provide the bulk of what they wanted, even covertly.
Second, China’s motivation would have been to prevent a major Russian defeat, not to accelerate a Russian victory. If you look at the conflict now, while Ukraine’s forces face problems of corrosion and Russia faces long-term economic troubles, no one would seriously argue that the Russians are on the verge of collapse. As long as that’s true, China has other geopolitical interests to protect. The more uncertain US-China relations become, the more China will try to preserve some flexibility in its relationship with Europe, and that will restrain it from providing all-out military aid to Russia.
Jordan Schneider: Oh my god, the UK-China spy scandal.
Shashank Joshi: Crazy, crazy story. Total mess.
Jordan Schneider: Absolutely.
Shashank Joshi: I can’t tell you definitively why this case collapsed. Initially, my gut feeling was that the Crown Prosecution Service — which is independent from government leadership, unlike in the US, I’m sorry to say — dropped the case because government witnesses wouldn’t testify that China is a national security threat. This is a requirement under the arcane 1911 Official Secrets Act used to charge the two individuals. If the government wouldn’t provide a robust assertion that China is a national security threat to satisfy the Official Secrets Act, then I could see why prosecutors dropped the case.
But after seeing the government’s evidence — specifically the three witness statements by Matthew Collins, the Deputy National Security Advisor — that explanation doesn’t hold. Those statements lay out the full spectrum of Chinese espionage. They discuss China’s authoritarian status and the challenge it poses, its influence operations, and its willingness to co-opt people early in their careers to influence policy, not just steal secrets. Taken together, I do not know what more the prosecutors could have wanted. They claim they were only 5% short of what they needed for a potential conviction, but I can’t imagine what more they needed.
Jordan Schneider: It’s wild and ridiculous. I’m not a UK legal expert, but it seems like there was a political decision to pull this case. I do not see another explanation.
Shashank Joshi: No, I do not think that’s true. We should not underestimate the Crown Prosecutor’s (CPS) independence. Prime Minister Starmer is a former Director of Public Prosecutions and former head of the CPS. He is strictly by the book on these matters and wouldn’t quash the case behind the scenes. That’s not how the system works.
It’s possible they decided to withhold evidence to avoid declaring in open court that “we are petrified of China and China is a massive national security threat.” But the witness statements do not soft-pedal the threat from China, if they were trying to avoid a diplomatic row, these are not the statements they would have provided. I think the prosecution was overly risk-averse or incompetent.
As this was going on, the government was grappling with its broader position on China, including the major decision to approve the new Chinese Embassy in East London. The proposed site is the former Royal Mint, where the Opium Wars ransom was taken in the 1840s. Amazingly, this detail has not been picked up by the British press. I find it incredible that the Chinese want to build their gigantic, Bond-villain-style mega-embassy on that exact spot. That decision was delayed again, and we are back in limbo, with the Chinese threatening grave consequences if the project is not approved. The hot potato has been kicked down the road again, to mix metaphors.
Trump’s ADHD Peace Process
[note: this show was recorded before Trump announced sanctioned on Russian oil]
Jordan Schneider: We will have to check on this again in a month or two. It seems likely the Trump administration will be inconsistent on this issue — wanting a quick solution and being agnostic about the long-term consequences. How much of these high-level summits and political dramas ripple down to the people on the front lines?
Rob Lee: There is an element of this that affects the Ukrainians who are fighting. They want American support, and for some, there is an idealistic view of the US as the leading democratic country and a global supporter of freedom. They see themselves as fighting against authoritarianism and oligarchy, and for democracy. For Ukrainians who deeply American ideals, it’s hard to see the US come short of its values.
For most soldiers, they may be frustrated, but their day-to-day reality is unchanged. The Russians have not stopped attacking. They know that even if the US increased weapons deliveries, it wouldn’t immediately end the war or the threat from Russia. Most Ukrainians are realistic — they understand that Russia will be a long-term threat even after a ceasefire or a peace deal is reached.
Ukrainian soldiers do watch developments in the US. During the Trump-Zelensky meeting in February, I was on the front line and watched the video with a mortar battery commander in his apartment. It was a very awkward moment that no one was happy about. It’s always a strange feeling for me, as an American, to be there and wonder what they think of me and if these events change their trust. In the end, we all recognized that the meeting went poorly and hoped for things to get better. By contrast, I was at the front during the recent Trump-Zelensky meeting in July, and the mood was more positive.
While Donald Trump’s rhetoric changes constantly — sometimes favorable to Ukraine, sometimes very negative — what matters is what the US is actually doing. Since taking office, Trump has continued providing the aid and intelligence sharing that the Biden administration had established. It seems that intelligence sharing is as strong, if not stronger, than it was before. If the US is providing intelligence for deep strikes into Russian refineries, that’s notable. The big policy change was the creation of a system allowing European countries to buy US munitions for Ukraine, and that appears to be continuing. Other systems, like air-launched missiles, are expected to arrive in the next few months.
The rhetoric will go up and down, but if the US continues to provide critical weapons that Europeans cannot produce themselves — like Patriot interceptors and Guided Multiple Launch Rocket Systems (GMLRSs) — and Europe can buy these systems, it’s not the worst-case scenario. Some Ukrainians probably have a lower opinion of the US than they used to, but many still view the US favorably and don’t judge us for Trump’s rhetoric.
The key question is whether the Trump administration will coerce Ukraine to accept Russia’s proposal. If they threatened to cut off Patriot interceptors, GMLRS, or intelligence sharing, that would be significant. But if the US continues to assist Ukraine while stating a desire for a deal, there’s no real policy change.
Shashank Joshi: There are two fundamental points here. First, Donald Trump has not endorsed the Russian demand for land swaps — where Russia would cede claims in Kherson and Zaporizhzhia in exchange for the unoccupied parts of the Donbas. Instead, he favors a freeze in the conflict. I think a freeze could benefit Ukraine, if it’s followed up properly, a view I might not have held 18 months ago.
Second, Trump is still selling the Europeans weapons to provide to Ukraine. I asked NATO Secretary-General Mark Rutte if selling these weapons on commercial terms was less beneficial than the previous policy. He said no, the PURL scheme is at cost price, not commercial terms, and is relatively favorable. So long as those sales continue, and depending on whether you believe systems like Tomahawks were ever seriously on the table, US policy is fundamentally unchanged.
As the Europeans accept more financial burden for arming Ukraine, we need to consider what a European-led peace process might be. If the situation in the spring is unchanged — Ukraine’s position stabilizes after a brutal winter campaign against its energy grid, and Russia continues achieving minimal gains at a high cost — Russia may reconsider its position. Europe needs to have a vision for a peace process. For all his faults, Trump did initiate a peace process, albeit in a cack-handed and ludicrous fashion. Europeans need to accept that reality, but I don’t think the mentality in Europe is ready for that.
Rob Lee: The negotiation on Tomahawks at the last meeting was notable as a signal that Trump was less afraid of escalation than the Biden administration, not because the missiles themselves would be a game-changer. The number of Tomahawks provided would have been small, with minimal effect on the front line.
The important question is what other systems Trump might provide through the PURL system, such as Army Tactical Missile Systems (ATACMS). If his stance is that he won’t offer aid, but will sell whatever Ukraine wants, then some of these systems could be quite useful. The ERA air-launched missile, if it works, is low-cost and well-stocked, and could make Russia’s position difficult.
We focus too much on Trump’s ever-changing, daily rhetoric instead of what the US is actually doing. Looking at 2026, the war will become more costly and risky for both sides. Both economies are strained, while deep-strike capabilities are improving and critical infrastructure is frequently targeted, and casualties are very high. Although Russia is incurring immense losses, it is not clear where its breaking point is — be it economic, political, or in casualties. Russia has an unusually high tolerance for cost. Can Ukraine, a smaller country, continue to bear similar costs?
Shashank Joshi: Key variables on both sides are obscure or finely balanced. Russia’s demands are so draconian, it’s easy for Ukraine to reject them. If Russia offered a reasonable deal and a secure future for Ukraine, the decision to keep fighting would be harder. For now, it is in Ukraine’s interest to run these risks. Victory isn’t guaranteed, but it has a good chance of frustrating Russian objectives and sowing doubt among Russian leadership.
But we should be humble and accept that the balance could tip. After a rough winter, a Russian reconstitution, or a change in European politics — which I do not see on the horizon — the prognosis for Ukraine could worsen. I’m not confident predicting the outcome.
Jordan Schneider: The day after the Trump-Zelensky meeting in the White House, Rob and I discussed this with Mike Horowitz. Rob’s interpretation was the “taco trade,” where nothing changes, Trump doesn’t move in one direction or the other. But in a year, who knows what he’ll think. There’s a chance he could swing wildly, either siding with the Ukrainians and sending the CIA to blow up oil refineries or siding with Russia.
Shashank Joshi: People have to remember it cuts both ways. Trump isn’t taking risks on behalf of Ukraine. But the reverse is also true — he won’t spend massive resources to please the Russians either. If Trump thinks Putin is dragging his feet, he will detach himself. His tendency to retreat from difficult situations cuts both ways. He won’t coerce Ukraine in a meaningful way, because Ukraine still has things to offer him. We need to detach from the swings of Trump’s pendulum and focus instead on the longer trajectory of his vision, which is limiting the US’s exposure.
Jordan Schneider: The likely scenario is that the US keeps selling weapons to Europe and providing intelligence. Maybe there is a 10% chance Trump swings towards Ukraine, and a 10% chance he swings towards Putin. What I count on most is his deep and abiding ADHD. If something is not working, his attention will be diverted before he goes too far in any direction. That doesn’t mean adopting a different strategy — if yelling at Zelensky in the Oval Office does not get him anywhere, sending ICE to New York City will become his new focus.
Ukranians Soldiers Listen to Lady Gaga
Jordan Schneider: What is popular in the bunkers in Ukraine? What playlists are people downloading on Spotify before they go into airplane mode?
Rob Lee: You hear Western music. There is a song called “Fortress Bakhmut” that became popular during the battle, and it’s still played. Some songs are made for the military or are about the war.
Jordan Schneider: What genres of music are common? Pop, rock?
Rob Lee: It is the military, so there are probably a lot of metal and a lot of rap, similar to music tastes in the US military. I am sure it varies a bit. There are also a lot of women fighting, and they may have different music preferences. There is a joke that a lot of soldiers, even in the tough branches, like “white girl music.” There is always a love for Lady Gaga or Katy Perry. “Bad Romance” came out right before my Afghanistan deployment, and that became the song of our deployment.
Jordan Schneider: From an entertainment perspective, if they are on these two-to three-month rotations, are soldiers downloading shows on an iPad on Netflix to watch? They can’t be busy all the time.
Rob Lee: For Ukrainians, it depends. The infantrymen who go to the “zero line” don’t have tablets. They probably have phones, but connectivity is limited by heavy jamming, so they’re probably not watching TV. For the soldiers at a command post a couple of kilometers from the front line, everything is available. They can play video games and watch Netflix. If you go into a battery command post, and the movie Delta Force may be on one screen and an Xbox on another. It is a mix of entertainment, similar to what US or UK military personnel do downrange.
Jordan Schneider: Well, if anyone wants to write a review of Battlefield 6 from the perspective of someone fighting in Ukraine, I would be happy to run that article.
ChinaTalk is a reader-supported publication. To receive new posts and support my work, consider becoming a free or paid subscriber.
Jordan Schneider: Tobias, on the last show we did, Ishiba was on the ropes. Why don’t you pick the storyline up from late July 2025?
Tobias Harris: We last spoke during that weird interregnum. There had been some premature media reports saying Ishiba was going, which he then denied. After that, the pressure from within the LDP for him to leave just ratcheted up. He had lost two elections and lost the LDP’s control of the Diet — how could he not take responsibility? He managed to push that off for about a month.
Finally, in early September, the LDP released its Upper House election autopsy, analyzing what went wrong and how they got into this situation. The report’s overall conclusion was that the LDP had lost touch with too much of the electorate. There were sins of omission and sins of commission, but the bottom line was that Ishiba had not done enough to fix the situation. The subtext, of course, was that he was going to have to go. His situation became untenable, and within a few days, he was out.
Prime Minister Ishiba resigned on September 7, 2025. Source.
This led into September and a relatively more subdued leadership campaign compared to last year. We had five candidates instead of nine, though in practice, it was really a race among three. The campaign was shorter and involved less crisscrossing the country. The ambitions of the candidates seemed scaled back. It was just a very different experience compared to last year — and last year was not that long ago. The comparisons were very fresh and made it apparent just how much the party had changed in a year’s time.
Jordan Schneider: Who were the contestants?
Tobias Harris: All five had run last year. That was the other thing — we had heard from all of them, so what were they going to say that they didn’t last year?
We had, of course, the now-new Prime Minister Takaichi Sanae (高市 早苗). Koizumi Shinjiro (小泉 純一郎), who was Ishiba’s second agricultural minister, also ran again. We had the now-former Chief Cabinet Secretary Hayashi Yoshimasa (林 芳正), and Motegi Toshimitsu (茂木 敏充), who had been a foreign minister and senior cabinet minister for much of the second Abe administration and into the Suga administration. Rounding out the group was Kobayashi Takayuki (小林 鷹之), the young, generational-change candidate of the right wing.
We had all these familiar names and very familiar dynamics. It really ended up being a race between Hayashi, Takaichi, and Koizumi for the job.
Jordan Schneider: Was this a case of Koizumi dropping the ball? Did Takaichi really blossom this time around? How do you want to apportion the blame and the credit for how this election turned out?
Tobias Harris: It’s a mix of all of the above, which may be a dodge.
As a quick refresher on LDP elections, they had the option to use emergency rules but didn’t. They held a full election, which means every dues-paying member who meets certain qualifications gets to vote. Those votes determine proportionally how votes are distributed among the candidates, equaling the number of votes cast by the party’s national lawmakers. That’s the first round. If no candidate gets a majority, it goes to a runoff.
What ended up happening was that Takaichi, who is pretty popular with a plurality of the LDP’s rank-and-file, was poised to do well. She actually ended up outperforming her polling by anywhere between five and 10 points.
That was a pretty sizable polling miss. Either that, or there wasn’t a lot of polling in the final days of the campaign, and it’s possible many late-breaking, undecided voters broke for her. That’s certainly possible.
Even so, when you really look at it, Koizumi only underperformed slightly. I don’t think that’s ultimately why he lost. He lost because he wasn’t quite strong enough with the rank-and-file, and Hayashi ended up being a little too strong with them. When you look at their combined vote, they got around 47% together, compared to Takaichi’s 40%. The moderate part of the party just did a bad job strategically. If they had decided, “You know what, one of us has to be the person to inherit the mantle of Ishiba and Kishida, carry it forward, and we’ll join forces,” I don’t think Takaichi wins in that circumstance.
Before the race, there was a lot of talk about how Kobayashi would hurt Takaichi’s vote. That didn’t happen — Kobayashi wasn’t really a factor. But Hayashi and Koizumi were both strong enough to hurt each other, yet not strong enough individually to overwhelm Takaichi. That really is the story.
In fact, I went and crunched the numbers. Things could have gone very differently if just two or three thousand votes across the country had swung. It didn’t just matter that Takaichi won overall. It mattered where her votes were distributed. In the runoff, what matters is the 47 prefectural chapters, each of which has one vote. According to party rules, those votes are awarded to the candidate who wins the most votes in each prefecture.
Takaichi won 36 of the 47 prefectures. But when you look at the margins, there were something like 11 prefectures where Koizumi was within 500 votes of winning. If he had flipped those, it would have given him more votes. More importantly, a lot of the Diet members were following the results in their home prefectures. You probably had enough on-the-fence lawmakers who looked and thought, “Well, okay, the voters in my prefecture voted for Takaichi. Therefore, I guess that’s how I’m voting.”
If Koizumi flips more of those prefectural chapters, the race maybe looks different. It might have been an even closer race than it ended up being. It didn’t end up being that close in the second round, partly because many of those swing voters just went to Takaichi because she won the popular vote. But it could have been a very different race if the votes had been distributed just a little differently.
Jordan Schneider: What are the meta takeaways from this? Given your argument that there wasn’t a big shift in the electorate towards the right, is there a structural problem with the LDP moderates that they can’t get their act together? Do we just have two big egos? Of course, we have two big egos — these are people who want to be prime minister. What brought us down this path, aside from a handful of coin tosses?
Tobias Harris: Look, Ishiba won last year, so clearly the reformist, moderate part of the party has strength. One of the reasons it was surprising that Takaichi won is that the LDP’s electoral defeats last year and this year were concentrated among the right wing. The parts of the party that suffered most, like the former Abe faction, lost 40 or 50 members over the last two elections. There was every reason to think it would be difficult for Takaichi to even match her performance from last year because the parts of the party she needed were smaller. It certainly looked as if she was coming in with a disadvantage.
What ended up happening was not a big swing to the right. As we’ve established, she won because she had a unified plurality while the other part of the party was divided.
In that context, she also had an argument that was perhaps clearer than what either Koizumi or Hayashi were making. Her argument was, “Look, the reason why we’re suffering is that the party has moved too far to the center. We’ve lost the voters who were excited about Abe, and they’ve gone to Sanseitō and the Democratic Party for the People. The answer to our problem is simple — we just need to shift back to the right. Those voters will return, we’ll get them excited, and everything will be fine.”
Were enough voters convinced of that logic? I suppose you could say that. Koizumi’s answer was somewhat vague. I don’t think he had a clear, one-line explanation for how to fix what ailed the party. Hayashi, even more so, as Chief Cabinet Secretary under both Kishida and Ishiba, wasn’t really in a position to say, “We need dramatic change.” He was somewhat handicapped by having to be the continuity candidate.
In some ways, it’s hard to beat something with nothing. It’s not that Koizumi was offering nothing — it just wasn’t a clear, strong signal that could match what Takaichi was saying. Now, whether it works remains to be seen. There are real questions about whether that strategy will prove to be a cure-all. We’ll see what happens.
Takaichi’s Background, Rise, and Style
Jordan Schneider: Takaichi. Who is this person? What should we know about her?
Tobias Harris: She’s been in politics for a long time. She was elected the same year Abe was first elected, 1993. The “class of 1993” has now produced Abe as Prime Minister and Kishida as Prime Minister. It’s been around for a while.
She actually spent some time in parties other than the LDP early in her career because the ’90s were tumultuous. You had parties breaking apart, new parties forming, and the LDP was out of power when she first entered the Diet. It was a confusing time.
In the ’90s, she quickly gravitated towards Abe as part of this emerging group of new, young, ideological conservatives. They saw the end of the Cold War, the LDP being out of power, and the breaking of the economic bubble as an opportunity to make a new kind of politics and introduce wide-ranging reforms. She was quickly part of this group, wound up in the LDP, and really rode Abe’s coattails in some ways in her career.
She was pulled along when he became Prime Minister for the first time, and she was around him when he was “in the wilderness.” When he came back, she ended up in important roles throughout his second administration. He really was her patron. He helped her along and sponsored her. When she ran for the leadership for the first time in 2021, he was basically her campaign manager. She very much sees herself as committed to the same project, as carrying his work forward, dedicated to the “unfinished task of Abe-ism.” That’s very much who she is as a politician.
Takaichi celebrating her win of a Lower House seat as part of the “Class of ’93.” Source.
I will say, personality-wise and just who she is, she’s very different from Abe in a few important ways.
Unlike Abe, she is not a dynastic politician. He was a political blue blood through and through — grandson of a prime minister, son of a long-serving foreign minister who should have become prime minister. Abe felt he had inherited a political legacy he was responsible for carrying forward, which helped him move to the top of the LDP quickly.
Takaichi was not that. She’s from a more middle-class or working-class family in Nara and had to rise on her own. The expectation was that a college education wasn’t even appropriate for her. Her parents discouraged her from going to Tokyo. She really had to pull herself up and into politics. She did not have a parent helping her along and pushing her into the family business.
That makes her different in important ways. It gives her a more approachable charm and probably explains the pretty fanatical following she has among some of the grassroots. People really respond to her in ways that I think are quite genuine. She’s not everyone’s cup of tea, but for parts of the party, they really respond to the fact that she is, I guess you could say, more “salt of the earth.” Some people find that very appealing.
The other thing about her is that she’s really a policy wonk. She really commands the details of many different issues, through and through. She likes talking about it. When she has these conferences, she’ll speak at length and really likes to get down into the details.
This is very different from Abe. The thing about Abe was that he was a big-picture visionary — “This is the way I want to take the country,” and “This is how I think about what Japan needs to be.” With Takaichi, I find her visionary image-spinning can be a little derivative of Abe’s. She is much more comfortable when she starts getting into the details of policy. She’s a very, very different kind of politician in those ways.
Jordan Schneider: Let’s talk a little bit about having the first female prime minister.
Japan has a relatively low percentage of female Diet members compared to other democratic countries. Is it surprising that Japan’s first female prime minister comes from the right wing? How do we put all this together?
Tobias Harris: Given that the number of non-LDP prime ministers since 1955 is very small, the odds obviously favored someone from the LDP. The LDP, in particular, has few women. I was looking at these numbers today — the LDP has 38 female lawmakers between the two houses of the Diet, which is less than 10% of its 395 lawmakers. Apparently, between cabinet and sub-cabinet posts, a little more than 25% of those female lawmakers are now in the government in some form. There just aren’t a lot of women.
There’s something a little sui generis about Takaichi’s path. Not many women have endured as long as she has or successfully navigated LDP politics to get to a position where she could actually contend for the leadership. There haven’t been many female candidates for the leadership in the first place.
Did she get there entirely on her own? Clearly, she needed Abe’s patronage. I don’t think she gets to where she is without Abe giving her positions when he was able to do that. That’s not to diminish her political talents or her capabilities. She is a capable retail politician and has a strong command of many different policy issues. She’s formidable. But with the LDP being what it is, I don’t think that alone was sufficient to get her to the top, unfortunately. That’s just the reality.
Subsequently, whoever the next female prime minister ends up being may be able to do it by being a power in their own right, not someone who needed an Abe to pull them along. Or maybe Takaichi ends up being that patron herself. One thing to look at is how she’s using her power. Not so much the cabinet posts — only two of her 18 cabinet members are women — but more of the sub-cabinet posts are going to the younger generation of women. Clearly, she sees herself as being in a position to cultivate the next generation of female talent in the party and give them opportunities to develop those skills. So they won’t be as dependent on a powerful man using his power to help them along. It’s a little different, and it just reflects the time she was coming of age in Japanese politics. That was her pathway.
Jordan Schneider: She’s married to a parliamentarian who brought three kids from a prior marriage. Are any of them in politics? Is there a dynasty in the making?
Tobias Harris: I don’t get the sense that that’s what she’s trying to do. But if your father and stepmother are both Diet members, the chances you might be drawn into politics are probably high. Sometimes, though, the opposite happens. Abe’s older brother, for example, was exposed to it, hated it, and wanted nothing to do with it. It’s possible they might just find the whole thing repellent and have no interest.
One more note about Takaichi herself — she is a thoroughly political being. She is just so steeped in it — it really is her life. Yes, there are lots of stories about her hobbies — how she’s a fan of the Hanshin Tigers, she likes cars, and she had been a heavy metal drummer — but ultimately, this is someone who is thoroughly in the arena, a lot like Abe was. Ishiba teased her for her work ethic, the fact that she is really tireless, keeps long hours, and is just devoted to doing the work. That really is who she is as a politician in a lot of ways.
Jordan Schneider: Let’s talk about some of her policies. We’ll start with international relations and national defense. What’s remarkable about her agenda?
Tobias Harris:She is a hawk through and through. There’s really no question about that. She sees the world as dangerous, which is pretty much a consensus position in Japanese politics now, but she sees it with a greater urgency and has been sounding the alarm for longer. She sees the risks Japan faces being on the front lines, facing off against three nuclear-armed states right in its neighborhood that are working increasingly close together.
She sees a world of challenges. That includes traditional military threats, but it’s also food security, energy security, economic security, supply chains — it’s all of that. She sees many threats that Japan must essentially steel itself and harden itself against. Both last year and this year, when you look at how she has campaigned, that has been the essence of her message — we need a strong Japan because it’s a dangerous world, and I’m going to do what it takes to meet those threats.
Jordan Schneider: ChatGPT told me that one of the kids is a prefectural assembly member in Fukui.
Tobias Harris: The prefectural assembly is usually a stepping stone to national politics, so I wouldn’t be surprised.
Jordan Schneider: Yes, around 40 years old. ChatGPT can find basically nothing about the two daughters. Good for the Japanese press for keeping them under wraps. Will it stay like that?
Tobias Harris: I don’t know if that state of affairs will last. In general, the first ladies and the family aren’t in the spotlight nearly as much as they are in the United States. When family members of prime ministers in Japan wind up in the press, it’s usually because something has gone wrong.
Abe’s wife, Akie, was involved in the scandal with a school getting a sweetheart deal on some land. She was a patron of it, which resulted in a lot of unfavorable attention on her and her associations. That wasn’t great. There was also the scandal with Prime Minister Kishida’s son, who was working as one of his father’s aides and basically using government resources to go on shopping trips. Generally speaking, when the children of leaders are in the public eye, it means things aren’t going well. Something’s wrong.
Jordan Schneider: It’s just such a split screen from Kamala’s step-kids and how out there they were, or Biden’s grandkids as well.
Tobias Harris: Maybe it tells you that America doesn’t have a monarch and yet treats its presidents’ families and presidential candidates’ families as if they are royal families, more so than Japan, which actually has an imperial family. The imperial family, of course, gets lots of press coverage and their goings-on get lots of attention. The media focuses on them instead of the family of the head of government.
Defense and Dealmaking
Jordan Schneider: Referring back to her agenda, what is her vision, and how, if at all, does it contrast with our most recent two prime ministers?
Tobias Harris: When you look at what she wants to do, a lot of it is putting Japan’s strengthening of its capabilities first, before anything else. Before cooperation with the United States, before cooperation with other countries, Japan has to do a lot more to defend itself. That means more defense spending, efforts to strengthen the Self-Defense Forces, and acquiring new capabilities for them.
One theme she’s been pretty insistent on for some time is Japan’s need for a proper equivalent of the CIA. You need a true national intelligence director. Right now, Japan has disparate intelligence functions spread across different parts of the government. She wants an intelligence agency directly under the cabinet and the Prime Minister, basically at the same level as the National Security Secretariat created at the beginning of Abe’s second administration. You’d have the National Security Advisor and, I guess, Japan’s DNI, for lack of a better term. She feels Japan has a real deficiency in its intelligence-gathering and analysis capabilities and needs to do more.
There’s a whole range of steps that need to be taken to raise Japan’s capabilities to another level, to complete the work of giving Japan a full national security establishment. I’ve argued in my book and elsewhere that building that establishment was one of Abe’s goals and accomplishments, but clearly, there was more to do. It took Kishida to get defense spending raised to another level. The intelligence apparatus questions were not really addressed systematically during the Abe years. There’s more to do, and she seems poised to move that to another level.
Jordan Schneider: We also have Koizumi as Defense Minister.
Tobias Harris: Yes, which is not bad for him and his resume. He’s done agricultural policy, he’s been the Environment Minister, and he’s done a lot of work in a party capacity on Social Security reform. He has not really had the foreign and national security policy portfolios. He is not necessarily a defense policy expert.
What we have seen in the Defense Ministry over the last several years is that the ministers are generally drawn from what are called “policy tribes” (zoku) in the LDP — groups of specialists in different policy areas. For the most part, with a couple of exceptions, the Defense Minister has been drawn from those ranks. Koizumi is not one of them.
He would probably say that because he comes from Yokosuka, which has a large U.S. Naval base and a large Japanese Maritime Self-Defense Force base, he has an innate understanding of defense issues from being in the constituency and working with military authorities. But he’s going to be doing a lot of work to get up to speed. He’s going to be in a position of dealing with big questions with the United States, signaling Japan’s ability to spend more on its own defense. We’re going to be coming up on host-nation support talks in the not-too-distant future. These are big issues, and he’s going to have to step it up.
Jordan Schneider: What was her calculus in putting him there?
Tobias Harris: Both Hayashi, Koizumi, and Motegi are in the cabinet, and Kobayashi is in a senior party post. In the interest of party unity, she wanted to keep all the rival candidates on her side to try to head off some sort of anti-Takaichi movement headed by one of them. It’s the Lyndon Johnson line about wanting your enemies inside the tent.
Ultimately, it’s about giving them work to do, keeping them on board, and forcing them to be part of making the Takaichi government a success. Abe did this as well. He was always trying to co-opt his would-be rivals. This is an old technique.
Jordan Schneider: Can we be serious on national defense if Koizumi is running the defense establishment?
Tobias Harris: Look, it’s a parliamentary system. Oftentimes, you get people doing different jobs and building up expertise on their way up. There are very few political appointees in any ministry, so there’s a lot of dependence on the bureaucracy and, of course, increasingly on uniformed Self-Defense Forces personnel. That’s all just part of it being a parliamentary system — you do the jobs, and then you acquire the expertise and experience.
If it goes well, he can end up in a position where he now has this expertise in addition to his other experiences. I don’t think it’s necessarily cause for alarm, any more than some other, perhaps more concerning, Cabinet appointments we could talk about, maybe less from a national security standpoint.
If you listen to some parts of the Japanese commentary, there’s this idea that Koizumi is somehow not smart, that he’s...
Jordan Schneider: A lightweight.
Tobias Harris: Yes. I frankly have never understood that line. If anything, from the moment he arrived in the Diet, he has been very reluctant to buy his own hype and has repeatedly shown a willingness to put in the work. He’s done not-particularly-glamorous jobs and taken on things that are not the most high-profile positions.
We saw this when he became Agricultural Minister earlier this year. Deployed correctly, his star power and his ability to command media attention can be useful. He took over while the government was dealing with a rice price crisis, and he immediately threw himself into high-profile measures — “I’m going to sit down and talk to retailers.” He used his ability to command media attention to actually move the government’s agenda.
Deployed correctly, he could be a real asset. There’s just a tendency to write him off as just a pretty face, but I don’t actually think that’s true. He has shown an ability to learn, to do the work, and to try to become a more well-rounded political leader.
Jordan Schneider I’ll give him six months to bone up, but we’ll be expecting a ChinaTalk appearance. Apparently, he does speak halfway decent English. The offer is outstanding. We won’t go straight for the PM. We can start with the Defense Minister.
Koizumi Shinjirō: your ChinaTalk debut awaits. Source.
Were there other remarkable aspects of her Cabinet announcement or her first few days on the throne?
Tobias Harris: We can talk overall about the Cabinet. This goes back to her including Hayashi and Koizumi in it. There are a lot of different philosophies about forming a cabinet. Ishiba’s cabinet, for example, relied heavily on friends and allies. In some ways, that might have done him in. He did not reach out to Takaichi to give her a high-profile job, nor did he reach out to the right wing of the party. His cabinet was very much, “I want to be in power with the people I trust most. I feel like I can’t trust anyone else.” It ended up being Ishiba surrounded by his lieutenants.
I don’t know if that ultimately did him any favors. It meant a lot of his most vociferous opponents were not in jobs that restricted their ability to speak out. He ultimately had this persistent bloc of the party that had nothing better to do than criticize how he was governing. That didn’t work well for him.
Takaichi, perhaps recognizing that her victory was not as overwhelming and preponderant as it seemed, reached out to Koizumi and Hayashi. There’s a pretty broad balance of distribution among members of various former factions, representing all different stripes. This is not just a bunch of right-wingers.
One thing I have flagged, though, is relevant to how Japanese governments work. The composition of the cabinet matters a lot for political reasons. But if you want to look at how the government is actually going to work, you have to look at the Prime Minister’s Office (the Kantei) and who is in the jobs most immediately around the prime minister. That tells you who the sounding board is, who’s sitting around the table making decisions and setting priorities, who’s delivering the prime minister’s will directly to the bureaucrats, and who’s deciding how the government communicates its messages.
That group is much more conservative. The people around her — her Chief Cabinet Secretary, her Deputy Chief Cabinet Secretaries, the aides and advisors — are much more uniformly from the right wing of the party. For the cabinet posts, she did the politically expedient thing. She brought in rivals and people who had to be rewarded. But when you look at who’s in the key decision-making roles, it’s a much more conservative group.
Jordan Schneider: How are you expecting her conservatism (and that of her team) to manifest?
Tobias Harris: The most obvious thing will be on a couple of issues. One is national security. To some extent, there’s a consensus here. Kishida was the one who got the deal done to get defense spending to 2% of GDP in the first place. He pushed through changes that allow Japan to acquire strike capabilities. There’s a pretty broad consensus in the party. This isn’t necessarily a conservatives-versus-moderates issue.
Will having this conservative team give it more of an edge, a little more stridency, a willingness to push harder and faster? Yes. She has already talked about how she wants to move up the timeline for revising the three strategy documents, which outline, among other things, the five-year plan for defense spending. On the normal schedule, that wouldn’t be until 2027. She said at her first press conference yesterday that she wants to do that sooner.
Had Koizumi or Hayashi won, I don’t think they would be talking like that. The tone is different on that score. In general, you can see what she is doing that Ishiba was not. Pressing on the gas pedal on defense is one thing.
The other thing: to be a conservative in the LDP now is to be a fiscal dove. She tried to tone back some of the rhetoric. Last year, she ran as practically a modern monetary theorist. This year, she tried to trim it back and at least gesture in the direction of fiscal responsibility. But fundamentally, she still thinks deficits don’t really matter — that there are urgent needs, and if it means running bigger deficits to spend more on defense and other things, then we’ll do that.
That is something that absolutely differentiates her from pretty much any other candidate who might have become prime minister. Everyone else was much more cautious about it. Ishiba was very cautious. The question is whether she’s going to be able to get away with that, given the condition of the bond market already. The bond vigilantes are keeping a watch out. That’s going to be one of the major questions that determines her durability. It’s a major difference and something that will color how she governs.
Other things that might make her different — clearly, even though the consensus within the LDP and across parties on foreign population issues has changed, she centered that in her campaign more than any other candidate. She talked about the need to get foreign tourists to “behave themselves” more and cracking down on lawbreaking by foreign residents. She took a much more strident stance on that, has already created a cabinet portfolio to deal with these issues, and will likely be setting up a headquarters to oversee them. She’s going to move in a more strident direction, partly because she’s trying to head off a threat from the LDP’s right, from Sanseitō as well. She has to have an answer to these issues. That’s another area where she’s going to lean into taking a more hawkish stance compared to others.
Coalition Challenges
Jordan Schneider: Let’s jump forward to her policy agenda. The LDP doesn’t have a majority on its own, so she’s in a coalition government. She swapped. We have a new partner. What is that dynamic? How stable is this all likely to be, Tobias?
Tobias Harris: We have to step back. This has been one of those months where a decade’s worth of events seem to have happened. From the moment she won on October 4, less than a week later, six days later, the LDP’s 26-year-old coalition with Komeito ended. Komeito is a centrist, nominally pacifist Buddhist party that supported the LDP both in government and during their three years in opposition. That coalition broke down.
To some extent, the writing had been on the wall for a while. Komeito’s electoral strength had been declining, and plenty of people on the LDP’s right had tired of relying on a party that consciously described itself as a “brake” on the LDP’s more right-wing tendencies. There was a sense that the coalition would break sooner or later.
This immediately created a problem for Takaichi. By not bringing Komeito into the government, instead of going into the prime ministerial vote with a minimum of 220 votes (13 shy of a majority in the lower house), she was 37 votes shy. This was a much trickier challenge. It created a window of opportunity for opposition parties to try to organize a campaign for someone else to become Prime Minister. The talks got started and looked like they were making progress in overcoming policy differences, but they ultimately failed.
They failed because the LDP managed to pry away one of those parties — Ishin no Kai (日本維新の会), the Japan Innovation Party. This is the Osaka-based party. You could describe it as neoliberal, quasi-populist, or conservative. Ishin had been in talks to possibly elect Tamaki Yuichiro (玉木 雄一郎) as Prime Minister. Then, they got a call from the LDP saying, “We’ll talk.” Within a couple of days, it became clear there would be an arrangement between Ishin no Kai and the LDP to ensure Takaichi would become Prime Minister.
Jordan Schneider: Are they just hanging out in bars? How is this actually going down in real time?
Tobias Harris: There’s a lot of that in Japanese politics. In the back alleys of Nagatacho and Akasaka, near the Diet members’ office buildings, a lot of business gets conducted in drinking establishments. Does it exclusively happen there? Not necessarily. Some of it is formal conferences, and some of it is text logs and surreptitious messages. My understanding is the dialogue between Takaichi and Ishin actually started with a text, which then led to more formal discussions. Politics is politics, right? Same anywhere.
The thing that was uncertain is that Ishin is a weird party. I’ll freely admit I struggle with them because I don’t know Osaka. I’ve spent loads of time in Tokyo. Every time I’ve lived in Japan, it’s been in the greater Tokyo area. I’ve been to Osaka, but never for long, so it’s a mystery to me. Ishin no Kai has had almost a monopoly on power in greater Osaka for 15 years now. I don’t entirely understand how they’ve made it work.
I wrote a review of a Japanese book I read on the first decade of Ishin no Kai. I was trying to understand their ups and downs. It seems they have these periods where they look like they’re booming, expanding nationally, and becoming a major third party to challenge the LDP from the right. Then, everything collapses, they retreat to Osaka, and they have to fight to hold on to it. A couple of years later, they have another boom. This has happened two or three times. It’s a very strange party, and I don’t understand how they’ve endured in Osaka as they have. But that’s who the LDP is now relying on.
It’s not a straightforward coalition. It wasn’t a one-for-one swap because Ishin decided they didn’t want any cabinet posts. They have an “external cooperation agreement.” As far as I know, looking at the text, all they promised to do was vote for Takaichi to become Prime Minister, which they did. Now they are in a position to say, “You’re not doing what you promised,” regarding a lengthy document listing all the policies the LDP has now promised to implement.
In most cases, the promises are vague — “We’ll study this,” or “We’ll set up a headquarters to study that.” But some promises are very specific and have specific timetables. If the LDP backs away, the barriers to exit for Ishin are very low.
I should note, it has been two days. They signed this on Monday — it’s Wednesday. One of the leaders of Ishin has already come out saying, “If we feel the LDP is not living up to its bargain, we will leave.” Takaichi has been Prime Minister for one day, and her partner is already threatening to quit.
Jordan Schneider: What happens if they do?
Tobias Harris: In practice, nothing. You just have a minority government. Technically, they are a minority government now. Unlike in other democracies with external partners, this is not a “confidence and supply” agreement, as far as I know. Ishin has not promised to side with the government on a no-confidence motion. It has not promised to vote for the government’s budget. All of its support is conditional. It is entirely conditional on Ishin feeling that the LDP is acting in good faith to implement the policies it wants.
In theory, they could leave, and Takaichi would still be Prime Minister and her government wouldn’t collapse. The question becomes, would they feel so bitter over the LDP’s breach of faith that they would support a no-confidence motion? That’s the real question.
If it happened before the budget passes, it would be a crisis. We can presume the assumption is that Ishin will vote for the budget next year. The government will ensure Ishin’s preferences are included when drafting it. But if Ishin is dissatisfied before then, all of that is up in the air. What does the budget look like? Where will the LDP get the votes? That becomes the most important question. But that’s only if Ishin leaves before late March.
Takaichi and Yoshimura Hirofumi (co-leader of Ishin no Kai) hold up the pact signed between their two parties. October 20, 2025. Source.
Jordan Schneider: Okay, so the coalition splits off, it’s a minority government, and they can’t pass a budget. Do we get elections? What happens next?
Tobias Harris: If things are so bad they can’t pass a budget, yes, we’d likely get a no-confidence motion that passes, which would trigger an election. They would “fight it out” at the polls. That would be my presumption if the relationship with Ishin broke down that badly.
Passing a no-confidence motion is hard. There’s a reason Ishiba didn’t actually face one — only one party, the Constitutional Democrats (CDP), is big enough to submit one independently, and they were reluctant. No other party wanted to take the lead. Ishiba escaped without one. You still have to get all the opposition parties on the same page, agreeing, “Yes, this is the time.” It also depends on Takaichi’s popularity. Are things going her way? (Presumably, if the coalition falls apart, they aren’t.) There’s no guarantee, but that would be the mechanism.
The reason one of Ishin’s leaders is already threatening to quit is that they made compromises that are causing friction. The LDP and Komeito broke up, proximately, over political finance reform. This was the fallout of this slush fund scandal that destroyed the factions, at least nominally, and really dragged down the LDP support. The party was supposed to really commit to tightening up regulations on donations — basically who can donate, who can receive donations, how should they be reported.
Earlier, at the start of this year, there had been some pretty extensive debates between the government and the opposition parties about what that should look like. Those talks ultimately broke down because on the one hand you had parties like the CDP and Ishin no Kai calling for basically a total ban on corporate political donations. The LDP is saying, “No, we can’t do that, that’s too much, but we should have a bunch of rules to increase transparency, much more accessible reporting, lower thresholds for reporting and things like that.”
Then you had this middle solution that Komeito and the Democratic Party for the People came up with, which was, “Well, we don’t want an outright ban, but it’s not enough to just do more transparency. Let’s limit the organizations that can receive donations.” Instead of every politician having their little fundraising support group, if corporations want to give money, it has to be to either the national party or prefectural party. That was the compromise proposal.
In the coalition talks, Komeito said, “Hey, we have this proposal. We want you to sign on to it. We want to make this happen.” Takaichi generally has just thought the LDP didn’t have to reform anything — this was not a real issue, not a serious issue. It might also have to do with the fact that the right wing of the party is where the slush fund scandal originated from, and the people implicated in it tend to be her supporters. She was maybe constrained in taking a more aggressive approach to this issue. That ultimately is what led Komeito to say, “Okay, fine, we’re done. We can’t join the government because you won’t sign on to this.”
Enter Ishin no Kai, which has an even more hardline position on this. The LDP is like, “We just pushed away our longtime coalition partner, who was offering a more modest proposal. Sorry, your proposal for a total ban is a complete non-starter.” Ishin no Kai says, “Okay, fine.”
Jordan Schneider: Why do they want corporate money in politics? Why is it important to the LDP?
Tobias Harris: Elections are expensive, and the LDP is really good at raising corporate money. Those majorities don’t fund themselves. If you have an overwhelming advantage in fundraising, are you going to unilaterally disarm? It makes sense that smaller parties want restrictions — they are more dependent on public funding, while the LDP supplements public funding with private funding.
The LDP told Ishin the ban was a non-starter. Ishin then turned around and said, “Okay, if we can’t do that, we have another core political reform idea: there are too many Diet members. Let’s eliminate 10%.”
Jordan Schneider: I love this as an idea.
Tobias Harris: I actually hate it. When you do the math, the lawmaker-per-capita number in Japan is much better (fewer voters per representative) than in the United States, which has three times as many people. Having worked for a Diet member, I’ve seen the relative lack of distance between national lawmakers and voters, and I think that’s a good thing. When that ratio is lower, you have more opportunities to actually see your representatives, interact with them, and be listened to by them. Frankly, there’s no reason for Japan to cut the number of lawmakers.
For Ishin, this is partly about the urban-rural split. There’s been some correction, but urban Japan (where Ishin is centered) is still relatively underrepresented. They see too many seats for rural Japan, and this is a blunt instrument for fixing that.
They came back with this counterproposal and said, “We’re not going to accept, ‘we’ll study it.’ It has to be done during the Diet session that started yesterday.” You have until the end of the year to draw up this legislation and get it done. Takaichi said, “Fine, we’ll do it.”
She didn’t run this by her party. Immediately, LDP members were saying, “Wait a second. What seats do you plan on cutting? Whose seats are on the chopping block?” You immediately got pushback. You have the Secretary-General of the LDP saying yesterday — one day after signing the agreement — that this is going to be difficult to do. You also have pushback from other parties saying you can’t make a change like this without all-party buy-in. This is too big of a reform to just be something that “we’re the government and therefore we can just at a stroke get rid of a bunch of seats.”
They are setting up a pretty brutal fight within the LDP, between the LDP and Ishin, and between the government and the opposition. Public opinion hasn’t weighed in yet because basically they had a week to process this. Some of those voters who may feel like they’re going to lose representation may have thoughts about this.
Jordan Schneider: How do they kick people off the island? That was why I was so excited about this — the Hunger Games nature of it.
Tobias Harris: It wouldn’t happen until the next election. It’s like redistricting between elections. They just eliminate a district and say, “Good luck finding another,” which does create these “Survivor” situations. In depopulating prefectures, they’ll say, “You had four constituencies, now you only have three.” That means…
Jordan Schneider: Whoever gets the most donations from Toshiba gets to…
Tobias Harris: You end up with these scrambles. It’s not just the incumbent — other parties had candidates in that constituency who also want to run. You get a musical chairs situation where they’re taking a chair away.
There’s talk that if they do it, they would mostly eliminate seats from the proportional representation (PR) lists, not the constituencies. The electoral systems are mixed. This has small parties really upset because they rely on PR seats. The LDP would probably stand to gain the most, even more than Ishin, because the LDP does best in the single-seat constituencies. Small parties have a hard time winning those.
The interests slice in many different directions. It is a big change to spring on everyone, and they only have two months to figure it out. We’ll see.
Jordan Schneider: Any other dynamics to watch? “Japan First”?
Tobias Harris: We haven’t really talked much about the United States. Trump will be in Japan in less than a week. A week from now, he’ll be on his way home. This is a test for Takaichi right out of the gate.
There has been a lot of fretting, particularly in articles over the last couple of weeks, when it was unclear whether Japan would even have a new prime minister. The Foreign Ministry was worried the new leader wouldn’t have enough time to be briefed properly. When Ishiba first met Trump earlier this year, he had about 36 hours of briefings, and the ministry wanted the new prime minister to have at least that much. They needed the new leader in place by a specific date to get that done. It’ll probably be fine.
There’s already talk that this will be an “Abe nostalgia tour” for Trump. They’re expected to go to many of the same stops he visited with Abe in 2019, and Trump is scheduled to meet with Abe’s widow, Akie. Takaichi, at least in the near term, will be able to play that “Abe card.” The fact that she was so close to him means they can bond over their shared affection, which will play a part in ensuring this initial meeting goes well.
This probably explains why she immediately said, “We’re going to move quickly to raise defense spending.” In practice, working out the details will still take time, but being able to tell Trump, “Hey, last week I became prime minister, and the first thing I announced was raising defense spending,” is not a bad opening line.
Her team is also positioned for this. She made Motegi foreign minister, and his calling card has been “I negotiated a trade deal with Trump during the first Trump administration and he called me a tough negotiator. I’m going to be able to really build a good relationship.” The relationship’s in good hands. Akazawa, who negotiated the trade deal for Ishiba, is still in the cabinet in a different role, but will still probably be a channel for communication. In the near term things will probably be okay.
The bigger questions remain — How interested is this administration in Asia in the first place? How durable is the commitment to defend Japan? How committed is Trump to a mutually beneficial trading relationship? There are real questions about the implementation of the trade deal that was signed.
All those questions are for after next week. Next week is about the immediate rapport. Will they get along? What relationship will they have off the bat? I suspect it will be fine.
Jordan Schneider: It’s helpful that she’s a politician through and through. She knows she just has to subsume herself to this. She presumably has plenty of experience subsuming herself to horrific male egos over the course of her career. Having to hold that for two days... I don’t know. We’re rooting for her. I feel like she’s got this.
Tobias Harris: Yes, it will be nerve-wracking, and everyone will be watching to see what the rapport is like. But just from what we’ve seen of Trump — to the extent we can understand his feelings — the way he talks about Abe suggests a real, genuine affection, to the extent he feels genuine affection for anyone. There does seem to be real sentiment there. The fact that Takaichi certainly shares that affection will go a long way.
Even if Abe were alive and somehow Prime Minister again, he wouldn’t have gotten a pass on the tough negotiations. He still would have had to negotiate and find a package that would make Trump happy. The result probably would have looked very similar to what Japan ended up getting under Ishiba. Ultimately, Japan’s interests are Japan’s interests, and any Japanese government would try to hold the line in much the same way Ishiba did.
Takaichi, to the extent that she does what this administration wants — raising defense spending, contributing more to host-nation support, signing up for economic security measures regarding China — can minimize friction.
The question is, will there be a point at which the Trump administration asks for things Japan doesn’t want to do? As Takaichi herself said during the LDP leadership campaign, is there a point — like this idea of Japan giving the U.S. $550 billion — where the actual mechanics are very unfair to Japan? Is there a point where it becomes very hard for Takaichi, or any Japanese leader, to say, “No, we can’t go along with this”? We don’t know yet because we’re still waiting for the details, but that’s a real question.
Takaichi is a nationalist. She wants to stand up for a strong Japan. That includes saying “no” if the United States does something that makes Japan look weak or harms its interests.
This is the duality of the Japanese right-wing. They are very committed to the U.S. alliance. There’s an appreciation that the alliance is the best pathway to bolster Japan’s strength and relevance, and practically, Japan needs the U.S. for regional security. On the other hand, in some corners, there is outright anti-Americanism. In other corners, it’s more “America-frustration” or skepticism, recognizing that the two countries are not aligned 100% on everything.
Sometimes, particularly (but not only) when Democrats are president, there’s a feeling that US values are not necessarily Japanese values. For the right wing, this often surfaces around historical issues. Republicans have criticized Japan over historical issues. The George W. Bush administration and Abe had a fight over the “comfort women” issue. Republicans in Congress were criticizing Abe for his statements about that issue. The bottom line is that the Japanese right has a complicated relationship with America.
Jordan Schneider: I started listening to this meta-podcast called The r/BillSimmons Podcast about The BS Report, about how Bill Simmons’s podcasting has changed and gotten worse over time. One of the main critiques is that basically he doesn’t watch the games anymore. His heart’s not in it. He doesn’t even know what he’s talking about. He’s just making dumb jokes.
Whenever I do a show with you about Japan, Tobias, I feel like I’m inhabiting that post-pandemic Bill Simmons energy. On the tech and China stuff, I actually know what I’m talking about, but not at all when it comes to the minutiae of intra-Japanese party drama.
I’d like to thank you, Tobias, for your patience, and thank the audience as well for their patience as I go on this long journey to understand this country better. Thank you to the US-Japan Foundation for sponsoring this podcast.
Tobias, it’s always a pleasure. I learn a ton and I can’t wait to check in in a few months — once the government falls apart, or not. To be sure, there will be plenty more drama to come.
我们跟着游行队伍在苏黎世最传统的左翼街区穿行,大家一起用法语喊出反法西斯和international solidarity(霸王花注:跨越国界的声援和支持)这样的口号,还有“from river to the see Palestine will be free”(霸王花注:从约旦河到地中海,巴勒斯坦将获得自由),终于把自己愤怒的声音从胸口中吐纳了出来,让它在苏黎世的城市楼宇之间回荡。
苏黎世的wiedikon(霸王花注:苏黎世西南部的一个区域)拥有着最多地道的国外餐厅、咖啡店、小酒吧,和最多的城市嬉皮,混杂着不同肤色的各国移民,也是历史悠久的犹太人聚居区。有些人从窗口伸出头跟着游行队伍一起大喊“free palestine”,高举双臂鼓掌,我还看到了一个年轻的亚洲学生对着游行队伍拍完照之后也加入了进来。事后,我小心翼翼地问那个巴勒斯坦女性为何来到瑞士?她告诉我,她从小就在约旦的难民营长大,之后有了机会去埃及读大学,认识了现在的丈夫跟着他才到了瑞士。我在一个叫We’re Not Kidding with Mehdi & Friends的播客节目中听到一个叫Alana Hadid的巴勒斯坦裔女性电影制作人说,所有海外巴勒斯坦人的命运都是一样的,1948年之后被迫迁移,从一个难民营到另一个难民营,浮萍一样流散,再也不能回到故土,即便那里早已面目全非。
在连无国界医生和Unicef(霸王花注:United Nations International Children’s Emergency Fund,联合国儿童基金会)这样的国际救援组织都一再称以色列在加沙进行种族灭绝之后,我的伴侣才放弃原来的中立立场。一年前我们一起看了一部半岛电视台出的深度调查纪录片《Octorber7》,在全世界为之愤怒的2023年10月7号那天到底发生了什么,纪录片里显示以色列国防安全部门一早就知道哈马斯行动并且一再警告防御,却没有得到以色列军方回应,哈马斯在行动前的每一天都在社交媒体上公开展示自己的训练,而以色列在巴勒斯坦人民居住区所设的摄像头更是数不胜数,更早前《纽约时报》里有一篇时评引用来自以色列谴责内塔亚胡贪腐的调查报告里写道,内塔亚胡长期通过卡塔尔给哈马斯输送现金,以确保哈马斯的军事力量。
更让我厌恶和无法抑制愤怒的是,我没有想到在苏黎世这样绿党占多数,最左倾具有进步意识的城市里,人们对于以巴问题这么最基础的对于人类道德底线的认知竟然会有如此巨大的分歧。我朋友的男朋友是做风投的banker,他支持以色列,他非常自信地说,他关注以巴冲突十年了,是巴勒斯坦三次拒绝了两国方案,“There is no fucking solution”,这是他对我朋友说的原话。
那天游行队伍有条不紊的从火车站广场一路用法语喊着反法西斯的口号,唱着国际歌,走向市政广场前,所有商铺都正常运营,市政广场中心位置的路边摊还因此收获了比往日更多的生意,摊主也热情地送出了还烫手的西班牙油条到邻近的游行者手上,当时只听见一个年老的男性声音用扩音器说,游行人群现在散去,不然警察就要出来维护秩序了。前面领头的游行小团体组织大概觉得不能再停在市政楼广场,就摆手让后面的人都跟上,转到左手边那一条街上,但那条街的两侧街道都被全副武装的警察堵死了,再往前走就有催泪弹和水枪径直瞄准了人群,所有人都猝不及防,我听到好多女孩惊叫,哭泣。所有人都靠着彼此往后退,转向另一头的时候又见到一排的警察,早有准备穿着防护服的游行者在前面围成了一道人墙来保护后面的人。黑色烟雾笼罩着伯尔尼阴郁的城市,形成了一场风暴,空气里都是臭氧的味道,我慌忙地把头缩在人和人的身体之间,在催泪弹和情绪被激发的双重作用下抑制不住地哭了,我旁边三个非常年轻的女孩子用很有经验的语气跟我说,“It will be over”,她们都用巴勒斯坦的围巾keffiyeh遮住了半张脸,其中一个女孩在人群慌乱移动的时候一直紧紧拉着我的手,她们一起抱住我跟着一波人群走出了那一条街。
“they want your activism to be non-disruptive, they want your protest to have a permit,they want your grief to remain palatable, but causing discomfort is not the same as casuing harm, the comfort have never liberated the oppressed.”
John brown,最为反抗两个多世纪的奴隶制的黑人领袖声称,如果政府行不公义之事,那么人们有权拿起武器,最后John Brown被判国罪处以绞刑。但同样后来诞生的白人K3党自称是骑士,却随意进入黑人家里施暴。在历史的进步与退步循环之间,John brown在美国又从左派的进步领袖,变成了现在特朗普这个极其Racist政权鼓吹的极端暴力的形象。
(2005年,英国的匿名街头艺术家Banksy在巴勒斯坦西岸的隔离墙留下涂鸦,在2017年成立名叫The Walled Off Hotel“被围起来的酒店”的酒店,酒店窗外风景是以色列设立的隔离墙和Banksy在墙上留下的象征free Palestine的涂鸦。)
另外推荐Guardian今年去以色列采访出的的纪录短片《Along the Green Line》,还有土耳其裔美国活动家Aysenur Ezgi Eygi在巴勒斯坦的活动和经历《Under an Olive Tree》以及荣获2025年奥斯卡最佳纪录片奖的《No Other Land》,记录了以色列军队在西岸地区强行拆除巴勒斯坦村庄的过程。
推荐我今天听的端传媒在Spotify上的播客《圆桌|人类命运不共同?四位学者的思辨》。还有一本去年出版澳大利亚记者,犹太作家的《The Palestine Laboratory》,讲的是以色列利用占领加沙这个全世界最大的Open air prison(露天监狱)制造军事武器、无人机、高科技监控技术,以反恐为目的给自己的经济利益打广告,形成了一条全球军事技术产业链。







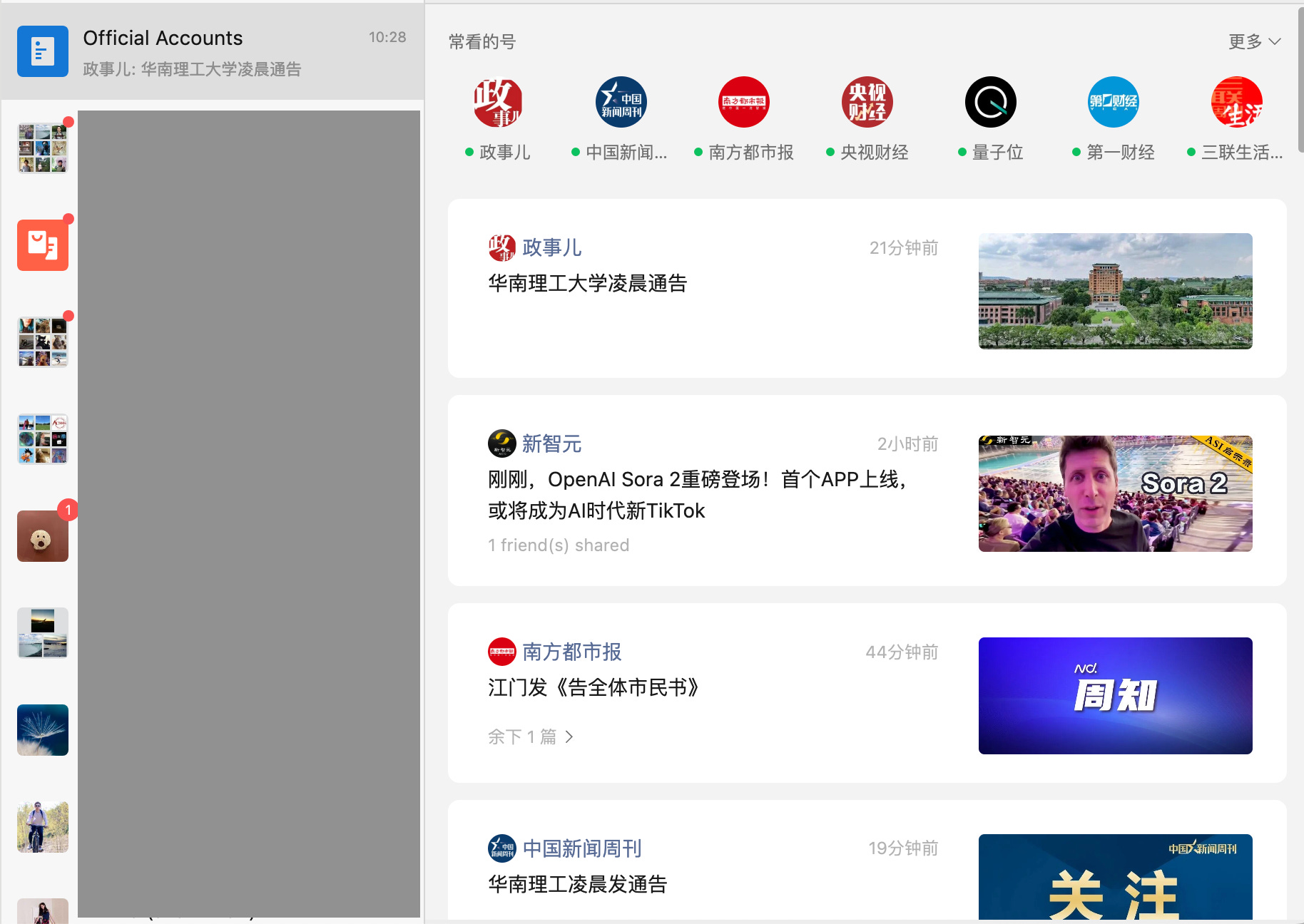
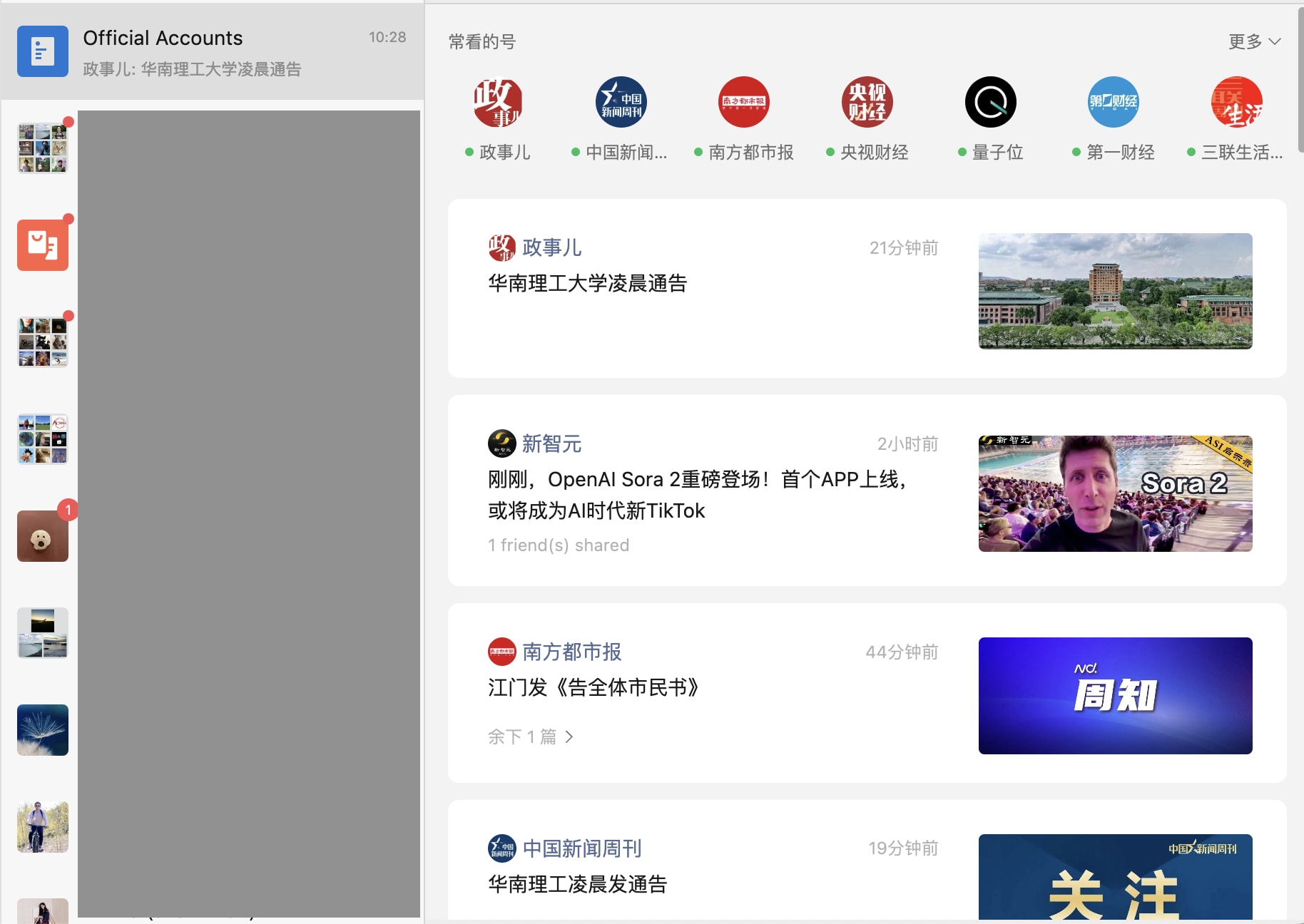












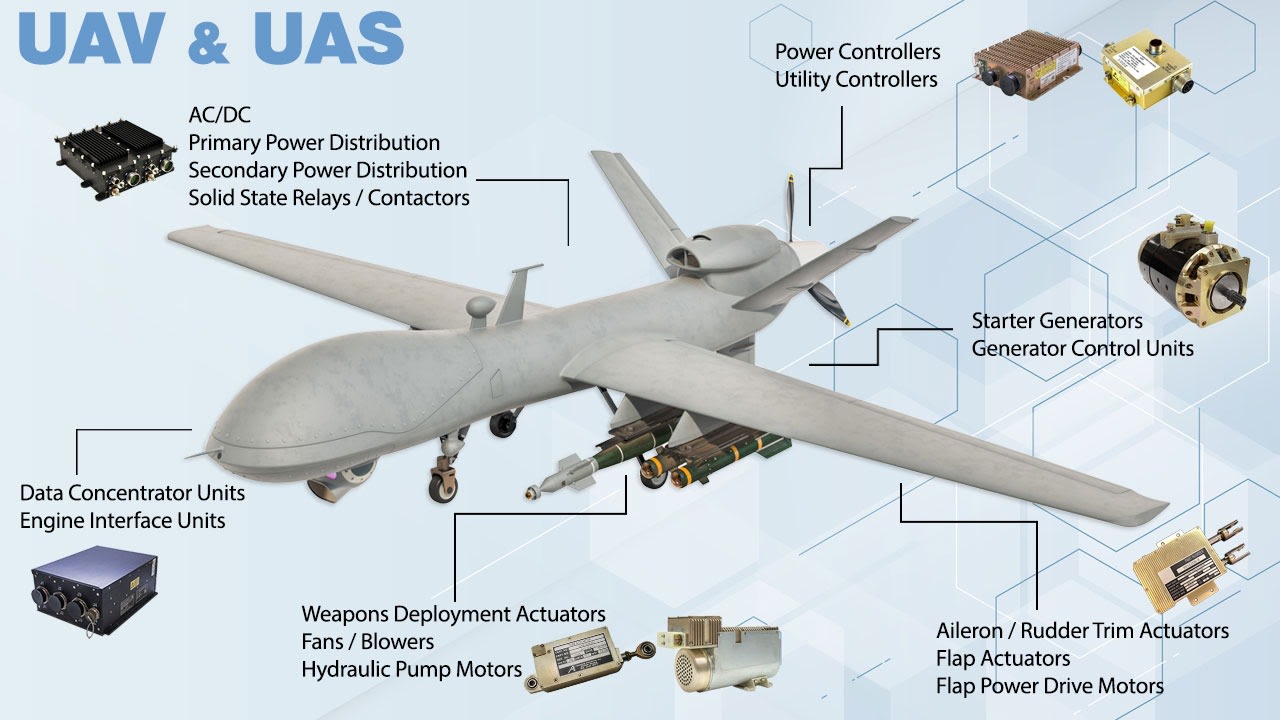


















{kind=link}
{kind=link}