Is it worth storing Time Machine backups on a faster drive?
Folk wisdom is that there’s little point in wasting a faster drive to store your Time Machine backups, because when those backups are made, their write speed is throttled by macOS. This article considers how true that might be, and what benefits there might be to using faster solid-state storage.
I/O Throttling
Documentation of I/O policy is in the man page for the getiopolicy_np() call in the Standard C Library, last revised in 2019, and prevailing settings are in sysctl’s debug.lowpri_throttle_* values. These draw a distinction between I/O to local disks, being “I/O sent to the media without going through a network” such as I/O “to internal and external hard drives, optical media in internal and external drives, flash drives, floppy disks, ram disks, and mounted disk images which reside on these media”, and those to “remote volumes” “that require network activity to complete the operation”. The latter are “currently only supported for remote volumes mounted by SMB or AFP.”
Inclusion of remote volumes is a relatively recent change, as in the previous version of this man page from 2006, they were explicitly excluded as “remote volumes mounted through networks (AFP, SMB, NFS, etc) or disk images residing on remote volumes.”
Five policy levels are supported:
- IOPOL_IMPORTANT, the default, where I/O is critical to system responsiveness.
- IOPOL_STANDARD, which may be delayed slightly to allow IOPOL_IMPORTANT to complete quickly, and presumably referred to in sysctl as Tier 1.
- IOPOL_UTILITY, for brief background threads that may be throttled to prevent impact on higher policy levels, in Tier 2.
- IOPOL_THROTTLE, for “long-running I/O intensive work, such as backups, search indexing, or file synchronization”, that will be throttled to prevent impact on higher policy levels, in Tier 3.
- IOPOL_PASSIVE, for mounting files from disk images, and the like, intended more for server situations so that lower policy levels aren’t slowed by them.
However, the idea that throttled I/O is intentionally slowed at all times isn’t supported by the explanation of how throttling works: “If a throttleable request occurs within a small time window of a request of higher priority, the thread that issued the throttleable I/O is forced to a sleep for a short period. This slows down the thread that issues the throttleable I/O so that higher-priority I/Os can complete with low-latency and receive a greater share of the disk bandwidth.”
Settings in sysctl for Tier 3 give the window duration as 500 milliseconds, and the sleep period as 200 ms, except for SSDs, whose sleep period is considerably shorter at just 25 ms. Those also set a maximum size for I/O at 131,072 bytes. You can view those settings in the debug section of Mints’ sysctl viewer.
Some years ago, it was discovered that the user can globally disable IOPOL_THROTTLE and presumably all other throttling policy with the commandsudo sysctl debug.lowpri_throttle_enabled=0
although that doesn’t persist across restarts, and isn’t documented in the man page for sysctl. This is provided in an option in St. Clair Software’s App Tamer, to “Accelerate Time Machine backups”, for those who’d rather avoid the command line.
Performance checks
Before each Time Machine backup starts, backupd runs two checks of disk performance, by writing one 50 MB file and 500 4 KB files to the backup volume, reported in the log asChecking destination IO performance at "/Volumes/ThunderBay2"
Wrote 1 50 MB file at 286.74 MB/s to "/Volumes/ThunderBay2" in 0.174 seconds
Concurrently wrote 500 4 KB files at 23.17 MB/s to "/Volumes/ThunderBay2" in 0.088 seconds
With normal throttling in force, there’s surprisingly wide variation that appears only weakly related to underlying SSD performance, as shown in the table below.

Results from the three first full backups are far greater than those for subsequent automatic backups, with single-file tests recording 900-1100 MB/s, and multi-file tests 75-80 MB/s. Routine backups after those ranged from 190-365 MB/s and 3-32 MB/s, less than half. Most extraordinary are the results for the OWC Express 1M2 enclosure when used with an M3 Pro: on the first full backup, the 50 MB test achieved 910 MB/s, but an hour later during the first automatic backup that fell to 191 MB/s.

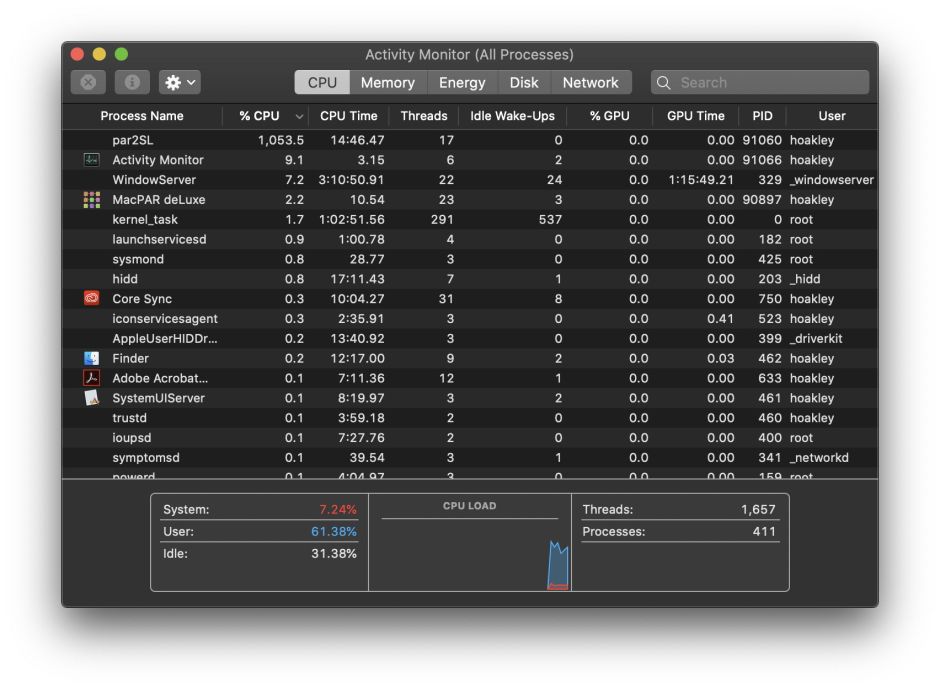
Evidence suggests that in macOS Sequoia, at least, first full backups may now run differently, and make more use of P cores, as shown in the CPU History window above. In comparison, automatic backups are confined to the E cores. However, the backup itself still runs at a tenth of the measured write speed of the SSD.
Time Machine runs the first full backup as a ‘manual backup’ rather than scheduling it through the DAS-CTS dispatching mechanism. It’s therefore plausible that initial backups aren’t run at a Background QoS, so given access to P cores, and at a higher I/O throttling policy than IOPOL_THROTTLE, so being given higher priority access to I/O.
Changing policy
When tested here previously, disabling throttling policy appeared to have little effect on Time Machine’s initial performance checks, but transfer rates during backups were as much as 150% of those achieved when throttling policy was in force.
The big disadvantage of completely disabling throttling policy is that this can only be applied globally, so including I/O for Spotlight indexing, file synchronisation, other background tasks and those needing high-priority access to I/O. Leaving the policy disabled in normal circumstances could readily lead to adverse side-effects, allowing Spotlight indexing threads to swamp important user storage access, for example.
SSD or hard disk?
Despite wide variation in test results, all those for the 50 MB file were far in excess of the highest write speed measured for any equivalent hard disk at 148 MB/s (for the outer disk). Overall backup speeds for the first full backup to a USB4 SSD were also double that hard disk write speed. When throttling does occur, the period of sleep enforced on writes to a hard disk is eight times longer than that for an SSD, making the impact of I/O throttling greater for a hard drive than an SSD.
Another good reason for preferring SSD rather than hard disk storage is the use of APFS, and its tendency over time to result in severe fragmentation in the file system metadata on hard disks. Provided that an SSD has Trim support it should continue to perform well for many years.
Conclusions
- macOS applies throttling policies on I/O with both local and networked storage to ensure that I/O-intensive tasks like backing up don’t block higher priority access.
- Disabling those policies isn’t wise because of its general effects.
- Those policies use different settings for I/O to SSDs from those for other types of storage to allow for their different performance.
- First full backups to SSD appear to run at higher priority to allow them to complete more quickly.
- As a result, effective write speeds to SSDs during Time Machine backups are significantly faster than could be achieved to hard disks.
- When the consequences of using APFS on hard disks are taken into account, storing Time Machine backups on SSD has considerable advantages in terms of both speed and longevity.