Meta AR 眼镜前主管加入 OpenAI,曾负责苹果 MacBook 设计
OpenAI 近日来在 AI 硬件领域的动作不断:先是要自主「造芯」,昨日又将 Meta 公司 Orion AR 眼镜的前硬件主管凯特琳·卡利诺夫斯基(Caitlin Kalinowski)招入麾下,并让她领导机器人技术和消费硬件。

▲凯特琳·卡利诺夫斯基(图源:NewsBytes)
凯特琳·卡利诺夫斯基是一名硬件高管,于 2022 年 3 月开始领导 Meta 的 AR 眼镜团队。Meta 在 Connect 大会上所展示的令人印象深刻的 Orion 智能眼镜的原型机就出自她的督导。

▲图源:Meta
在此之前,她还领导了 Meta 的虚拟现实护目镜「Oculus VR」背后的硬件团队九年之久。

▲图源:Techradar
再早些时候,凯特琳·卡利诺夫斯基曾在苹果任职,为 MacBook 设计硬件。

▲图源:Apple
在加入 OpenAI 后,凯特琳表示「首先将专注于 OpenAI 的机器人工作和合作伙伴关系,以帮助将人工智能带入物理世界,并且为人类带来好处」。
巧合的是,近日「纽约时报」的一篇报道称凯特琳的前任老板,前苹果高管、传奇设计师乔尼·艾维(Jony Ive)也正在与 OpenAI 的 CEO 奥特曼联合创建一家新的初创公司。
艾维是一位来自英国的工业设计师,在苹果任职期间,主导设计了第一代 iPhone,iPod 等经典产品。他甚至参与了苹果的新总部大楼 Apple Park 的建筑设计和园区规划。

▲Apple Park
离开苹果后,他创立了自己的设计公司 LoveFrom,并继续与苹果合作。艾维和 OpenAI 的合作初创公司很可能会以 LoveFrom 为起点,并且凯特琳将会加入其中,他们将共同构建一款「使用 AI 创造计算体验,社会破坏性比 iPhone 更小」的硬件产品。

▲乔尼·艾维(图源:dezeen)
除这两员大将之外,OpenAI 最近还开始为一个机器人团队招聘研究工程师。招聘公告上写着「我们正在寻找具有强大研究背景以及人工智能应用交付经验的人才」。
OpenAI 希望机器人工程师能够调试端到端的机器学习问题,并且希望他们开发与机器人相关的机器学习架构,应用于其「核心模型」中。
正如 OpenAI 所说,这个研究团队旨在「为合作伙伴的机器人解锁新功能」,也就是帮助 OpenAI 的合作伙伴将其多模态人工智能整合到他们的硬件中。
目前,机器人公司 Figure 推出的人形 01 机器人已经利用 OpenAI 的软件进行自然语音对话;挪威公司 1X 也在其 Eve 机器人中使用 ChatGPT 的修改版本来处理和响应命令。

▲人形 01 机器人(图源:techbsb)
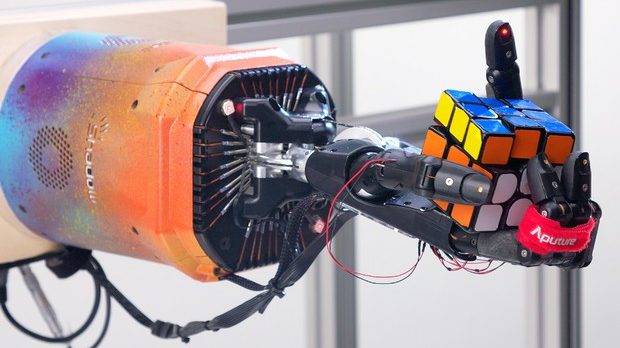
实际上,这并不是 OpenAI 首次启动硬件研究。早在 2018 年,OpenAI 就开发了名为「Dactyl」的机器人手,能够以人类手部相似的方式灵活操作物体,还成功地用一只手解决了「魔方问题」(Rubik’s Cube)
2020 年,在 GPT-3 发布之后,OpenAI 解散了其机器人研究团队,将重点转向了早期生成式 AI。
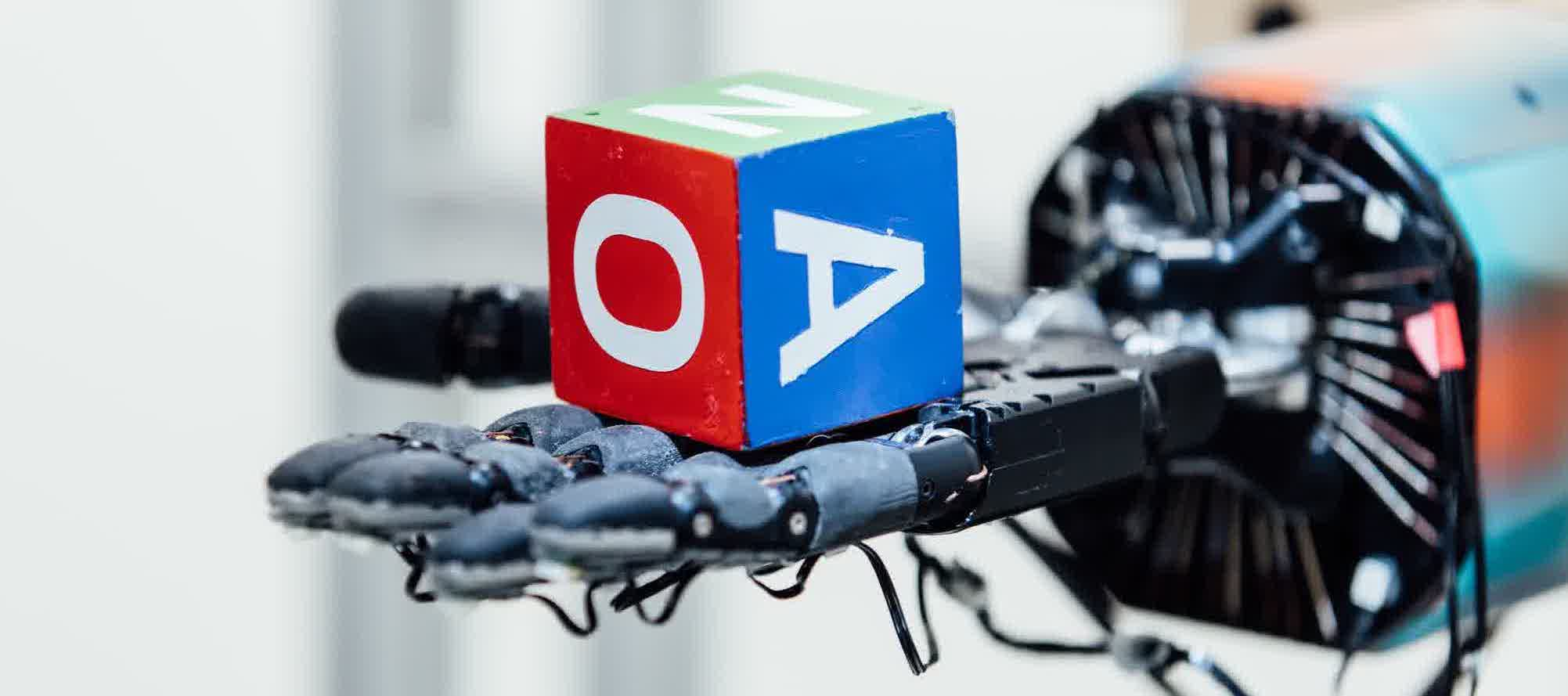
▲图源:OpenAI
未来,OpenAI 表示其机器人团队将「与机器人行业的合作伙伴合作,专注于构建一套模型以实现前沿机器人应用」。
在几乎引领了生成式 AI 的技术浪潮之后,OpenAI 又将重新出发,向 AI 硬件领域进军。
#欢迎关注爱范儿官方微信公众号:爱范儿(微信号:ifanr),更多精彩内容第一时间为您奉上。