没人再说理想「落后」了

理想在 5 月的理想 AI Talk 第二季预热了 VLA(Vision-Language-Action Model,视觉语言行动大模型)司机大模型,紧接着第二天又召开发布会,L6、L7、L8 和 L9 智能焕新版正式发布,并官宣 AD Max(高级辅助驾驶)搭载NVIDIA Thor-U 芯片,AD Pro 升级为新一代地平线征程 6M 芯片,成为全球首个大规模量产交付 NVIDIA Thor-U 芯片的高级辅助驾驶平台,拥有 700TOPS 的算力。
今年下半年,理想汽车将为 AD Max 平台带来 VLA 司机大模型方案,同时支持 Thor-U 芯片和双 Orin-X 芯片,将实现语音驾驶指令执行、漫游找车位、拍照位置识别代驾等高级辅助驾驶功能,与司机大模型沟通就像与人交流一样便捷。
一软一硬两场发布会的节奏,以及软硬结合的预期节奏,倒是让我想起了每年 6 月苹果召开的 WWDC,和每年 9 月的 iPhone 秋季发布会。
我们在 WWDC 上将会知道下一版本的苹果手机、电脑、平板和手表系统会有什么新能力,而在具体的发布会上,知道苹果的硬件是何水平。
另一个看完理想两场发布会让我想到的理想苹果两家企业相似点,可能要扯得更久远一些。

「落后」的技术?这个讨论没有必要了
1879 年,托马斯·爱迪生发明灯泡的时候,找到了一家玻璃制品公司,希望为他发明的灯泡制作稳定安全的灯罩,后来这家为爱迪生发明的灯泡吹制玻璃灯罩的公司,开始为 iPhone 的屏幕生产坚硬耐刮的大猩猩玻璃面板。
这家公司叫康宁,有意思的是,iPhone 发布于 2007 年,而康宁的大猩猩玻璃面板技术,早在 1962 年就出现了,中间隔了甚至快半个世纪。
相比于后来的各种高分子复合材料,康宁的大猩猩玻璃确实算不上什么领先的技术,它成本高重量重,在按键手机时代无人问津,直到 iPhone 的出现。

同样的,前几年人们在评判增程技术路线的时候,特别是理想 ONE 刚出现的那段时间,增程往往也会被打上「落后」的标签,因为从历史上讲,增程技术的雏形在一个世纪前就出现了,从结构上讲,发动机不直接作为动力输出而是为电机提供电力的形式听起来也槽点满满,再从愿景上说,环保是新能源汽车的历史使命之一,燃烧化石燃料让使命不够纯粹。
到了 2025 年,增程已经变成了几乎所有新能源品牌提振销量,迎合市场的必选路径,因为经过多年的市场教育,能电能油续航长的增程,经历了「落后技术,过渡技术和必选路径」的认知转变。
当然,几年前被认为更先进的纯电技术路线,出现的时间就更早了,比内燃机汽车还早。
聊了这么多,其实只为说明一个问题,看起来落后的技术,并不一定就会造就落后的产品,所谓落后技术造就良好产品的例子比比皆是。
机械键盘技术出现远远早于薄膜键盘,甚至一度因为成本因素几乎绝迹于市场,但如今却因为能带来更好的体验和使用寿命更受欢迎。
任天堂 Switch 发布时候的护航游戏《塞尔达传说:荒野之息》从画面技术上落后许多竞品平台的大型 3D 游戏,但并不妨碍它的极高口碑。
当然,理想和李想如今也不需要再为增程技术路线辩解什么了,毕竟各家新能源品牌都布局增程之后,汽车媒体圈的大儒们自然也会为增程辩经。

在理想 AI Talk 第二季上,理想创始人和 CEO 李想聊增程的地方极少,但却有特别的含义,一处是理想表示愿意为行业解决问题做贡献,做增程是为了解决电池成本高充电难的问题,做 5C 充电是为了解决电池充电慢等待久的问题,开源操作系统,是为了解决行业车控和智控系统系统差,开发慢,芯片匹配周期长的问题。
另外一处是李想表示理想辅助驾驶的原创性超过了增程,在里面投入的工作量更多。
在理想已经推出了 MEGA,并且纯电池车型 i8 即将发布的时间点,理想内部想必也不会再去理会增程或纯电这种无聊的路线之争。比如说,这一次理想 L8 和 L7 智能焕新版的 Max 车车型电池容量也升级为 52.3kWh,这已经比不少入门纯电车型的电池容量还要大了。
而行业趋势也是如此,因为增程汽车的使用场景已经纯电化了,所以高端增程汽车的大电池趋势非常明显,油箱主要起一个心理安慰的作用,毕竟用电成本远远小于烧油成本,「增程剂」还是太贵了。
而从理想的角度来看,自从去年李想宣布理想不是一家汽车企业,而是一家 AI 企业,AI 对于理想意味着未来的全部之后,我们也真的不必纠结带着理想车主驶向终点的是汽油和电力,而更应该思考,理想的汽车如何带领理想的车主和乘客驶向终点。

理想可以考虑得远一点
我们在 4 月写过《三排六座混动大 SUV,2025 年中国汽车市场的「版本答案」》,里面提到,国产汽车品牌大概经历了「摸着丰田大众过河」,到「摸着特斯拉过河」,现在差不多是「摸着理想和华为过河,同时也要摸一把小米和路虎甚至是劳斯莱斯」。
问界 M9、理想 L789 成为了过去两年时间里,中国汽车市场里兼具了「价格上探,定位拔高,智驾和智能并重,自己定义了品类,还能赚钱」多重要素的产品。
于是乎,我们看到了一大波三排六座混动大 SUV 出现在 2025 年:腾势 N9,领克 900,极氪 9X,小鹏 G01,深蓝 S09,昊铂 HL,吉利银河星舰 9,还有预计在年底发布的小米增程 SUV。
还有就是问界 M8,以及理想自己的 L8 和 L9 智能焕新版。
可以说,在理想 ONE 还有初代 L8 和 L9 的出现的时候,它们在市面上的竞争者寥寥无几,基本上都是燃油旗舰 SUV,动辄大几十万上百万的宝马 X7 或者奔驰 GLS 这些。
但是到了 2025 年,理想自己的 L8 和 L9 亲手打开的市场,涌入了巨量的竞争对手,并且各个来者不善,问界 M8 目前大定超过了 7 万,领克 900 上市一小时后大定就超过了1 万……
理想这一次的 L 系列焕新版发布,是对竞争的一种回应,也和前一天的 AI Talk 一道,表示理想可以考虑得远一点。毕竟在这一波造车新势力里,理想的财务状况是最健康的,相比于那些还在复读或者还在 ICU 的品牌,理想是竞争对手眼中已经保研硕博连读,或者在 KTV 里随意炫果盘的厂商了。
冰箱彩电大沙发的产品哲学,也和「增程」一起,从奇技淫巧,变成了以「用户需求为中心」。

彩电层面,L9 焕新版更新到了 3K 分辨率 21.4 英寸后舱娱乐屏,相比于 2024 款 L9 的后舱娱乐屏显示面积大了约 86%。
沙发(驾乘体验)层面的更新更为显著,首先是新增的 3 种模式 18 点热石揉捏按摩座椅,是行业里点位最多的座椅按摩;更重要的就是悬架的提升,L7 和 L8 焕新版全系标配魔毯双腔空悬,运动魔毯悬架提升弹簧刚度, 刚度提升 30%,舒适魔毯悬架降低弹簧刚度, 刚度下降 6%,在不同路况和驾驶需求下,运动的更运动,舒适的更舒适。
L9 全系搭载行业最前沿的双腔双阀魔毯空气悬架,这是中国品牌首次在量产车型上标配双腔双阀空气悬架。具体的驾乘感受上,起步抬头和刹车点头能被更有效的抑制,车身更稳;转弯时的侧倾更小,车身更稳;飞坡时上下起伏更小,车身也更平稳。另外,采用双腔双阀魔毯空气悬架的理想 L9,麋鹿测试时速 80.34 公里,这个成绩在全尺寸 SUV 中表现相当优秀。

用更大的电池,更好的屏幕和座舱系统,更优秀的悬架系统,来延续「增程+冰箱彩电大沙发」的产品逻辑是一种必然,加量不加价也在预期之内。
真正证明理想可以考虑远一点的,是辅助驾驶软硬件的升级。毕竟 2025 年中国汽车市场的「版本答案」,理想在 2022 年就给出了,那么 2025 年这个时间点,理想考虑的,会不会后面中国汽车市场某一个时间点的版本答案呢?
在 L 系列的 Max 和 Ultra 车型上用上了行业里第一批的 700 TOPS 算力 NVIDIA DRIVE Thor-U 芯片,全系升级到 ATL 全天候激光雷达,以及承诺今年下半年为 AD Max 平台带来 VLA 司机大模型方案,意味着理想从 2023 年年底到 2025 年下半年,即将完成辅助驾驶的三次技术更迭。
这种辅助驾驶的技术迭代速度,呼应了李想对于理想 AI 企业的自我定位,一家公司把核心资源投入在哪里,哪里进步最快,决定了这家公司的性质。
李想在 AI Talk 里说:
因为这些东西(VLA 司机大模型落地和建立司机 AI Agent)我们前面没有任何人走过这条路。DeepSeek 也没走过这条路,然后 OpenAI 也没有走过这条路,谷歌、Waymo 也没有走过这条路。我们其实走的是一个无人区。
企业的愿景和战略,也决定了产品的形态,也解释了为什么这一次 L 系列焕新版新闻稿里,理想定义的三个最重要的信息分别是辅助驾驶芯片升级,新一代 VLA 司机大模型落地,以及全系标配 ATL 全天候激光雷达和 AD Pro 主动安全能力看齐 AD Max。
这些是理想步入 AI 技术无人区的探索工具。
自 AI Talk 第二季详解了 VLA 司机大模型和次日 L 系列焕新版发布之后,理想股价涨幅已经超过了 10%,这可以认作是资本市场对理想战略和产品的认可。

开源的,前沿的,「落后」的,都是产品需要的
虽然特斯拉、理想和小鹏都不太愿意承认自己是一家汽车企业,但我们还是按照大众约定俗成的观点,统称主要营收来源为汽车的企业为汽车企业。
在这么多的汽车企业里,理想的愿景「创造移动的家,创造幸福的家」可以说是最具体而微小的,毕竟其他家的愿景基本都是改变世界,或者创造未来。
但愿景具体而微小,并不意味着难度小,或者任务简单。
比如说,上海车展期间,理想展出并宣布上市的 MEGA Home,非常取巧地平衡了空间,座椅数量,旋转座椅需求和中央大桌板的需求与矛盾。
这当然是工程能力的体现,更是产品能力的体现,实际上,汽车行业是一个并不缺工程能力,但优秀产品思维稀缺的行业,这也是为什么李想多年前在接受晚点 LatePost 采访时说:
很多人都认为自己会做产品,但我认为汽车这行业会做产品的人寥寥无几,大部分企业做产品最大的问题是懒惰,思考上的懒惰,系统上的懒惰,行为上的懒惰。
很多企业会做七座车,很多企业会做旋转座椅,一些企业也能在车里塞进个桌子,但在一个七座 MPV 里这么做的,只有理想。
当然,优秀的产品能力,很容易在舆论上被归结为走捷径或者投机取巧,现在理想押注的 VLA 司机大模型,理解成本更高,但理解之后,便可以更懂这家公司,以及这家公司小愿景背后的大愿景。

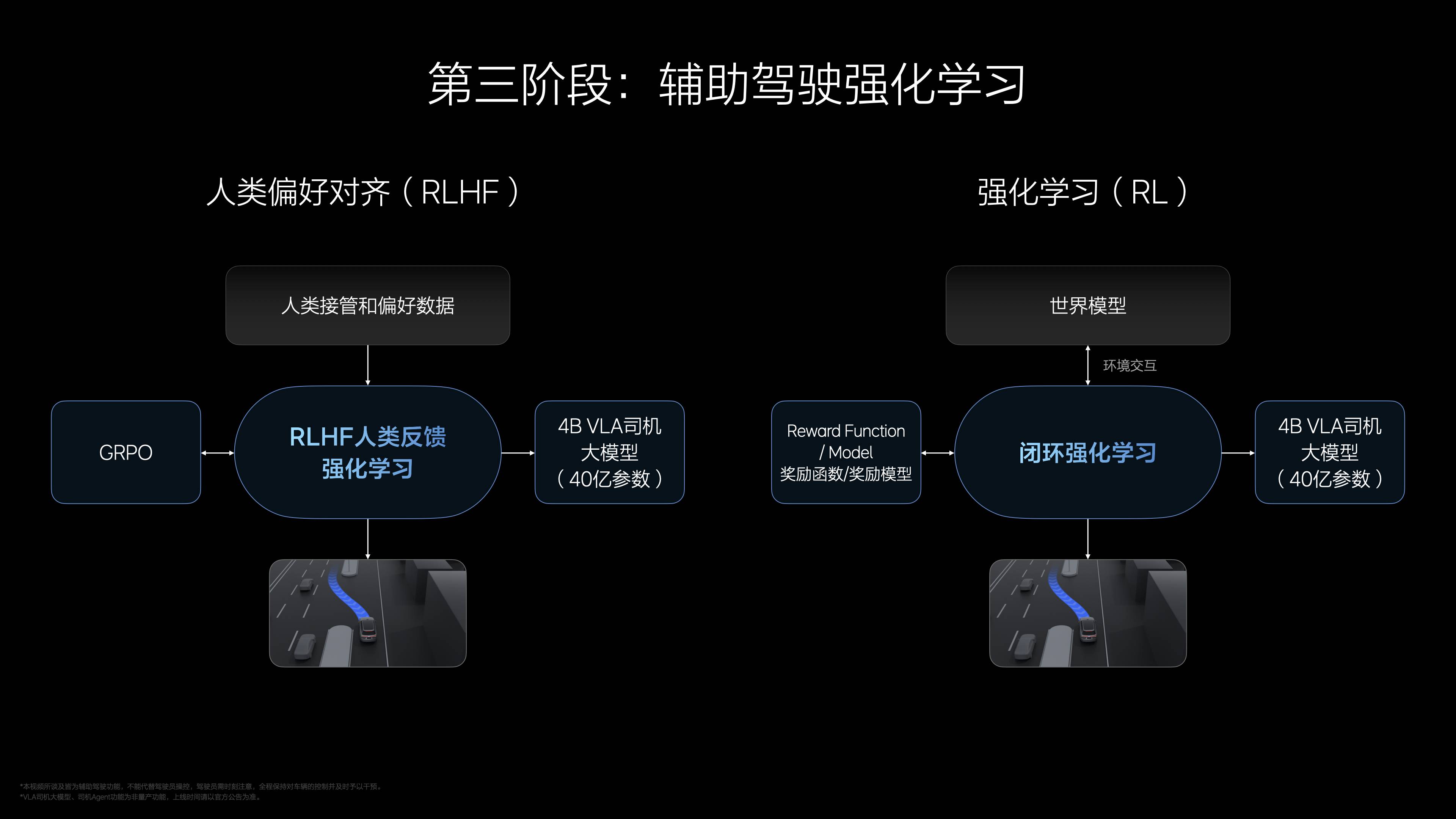
在 AI Talk 上,李想用了一个非常巧妙的比喻来解释什么是 VLA 司机大模型,以及理想辅助驾驶的进化:
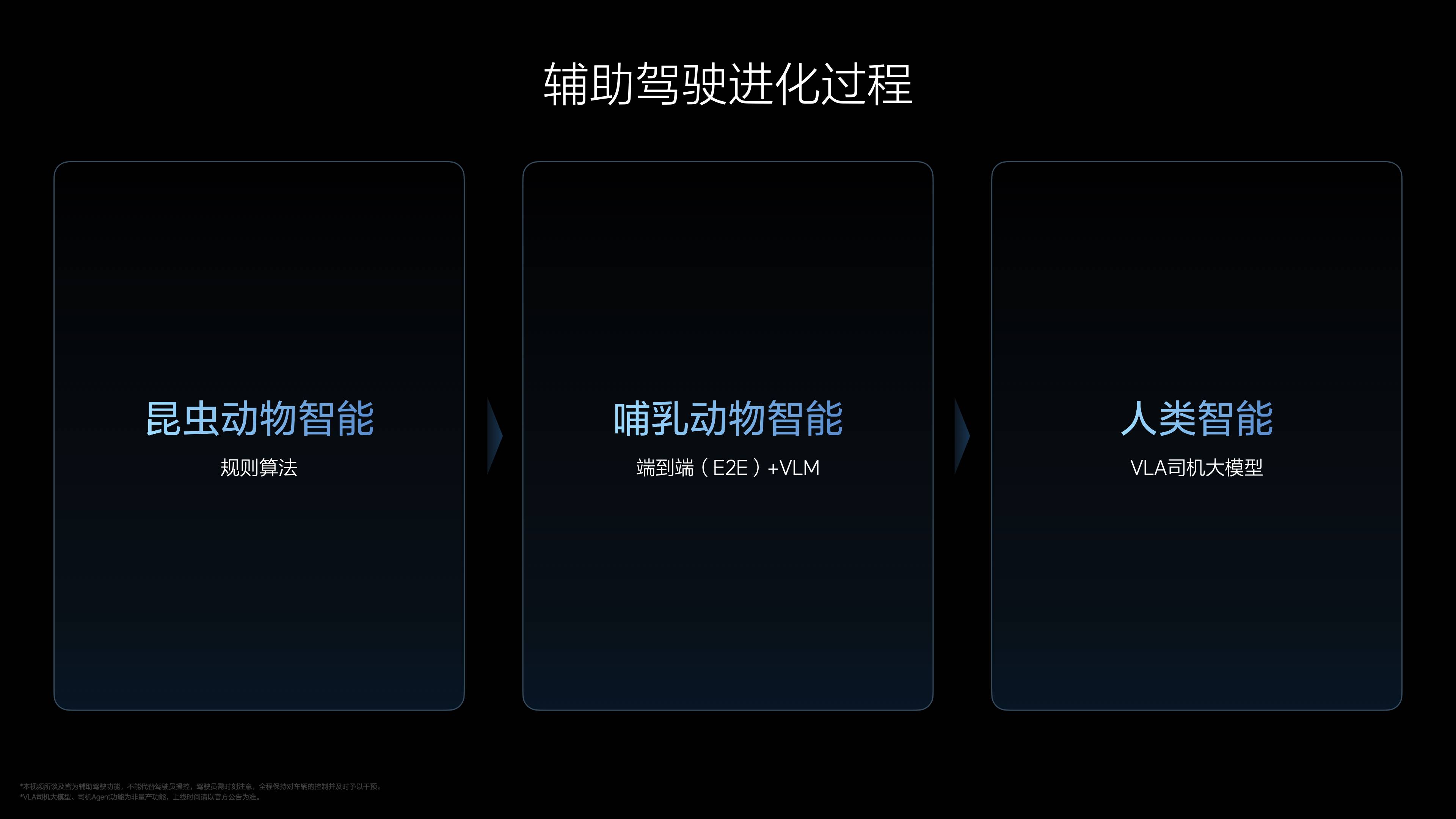
基于规则算法和高精地图的辅助驾驶技术,类似蚂蚁的行动和完成任务的方式,相当于昆虫动物智能。
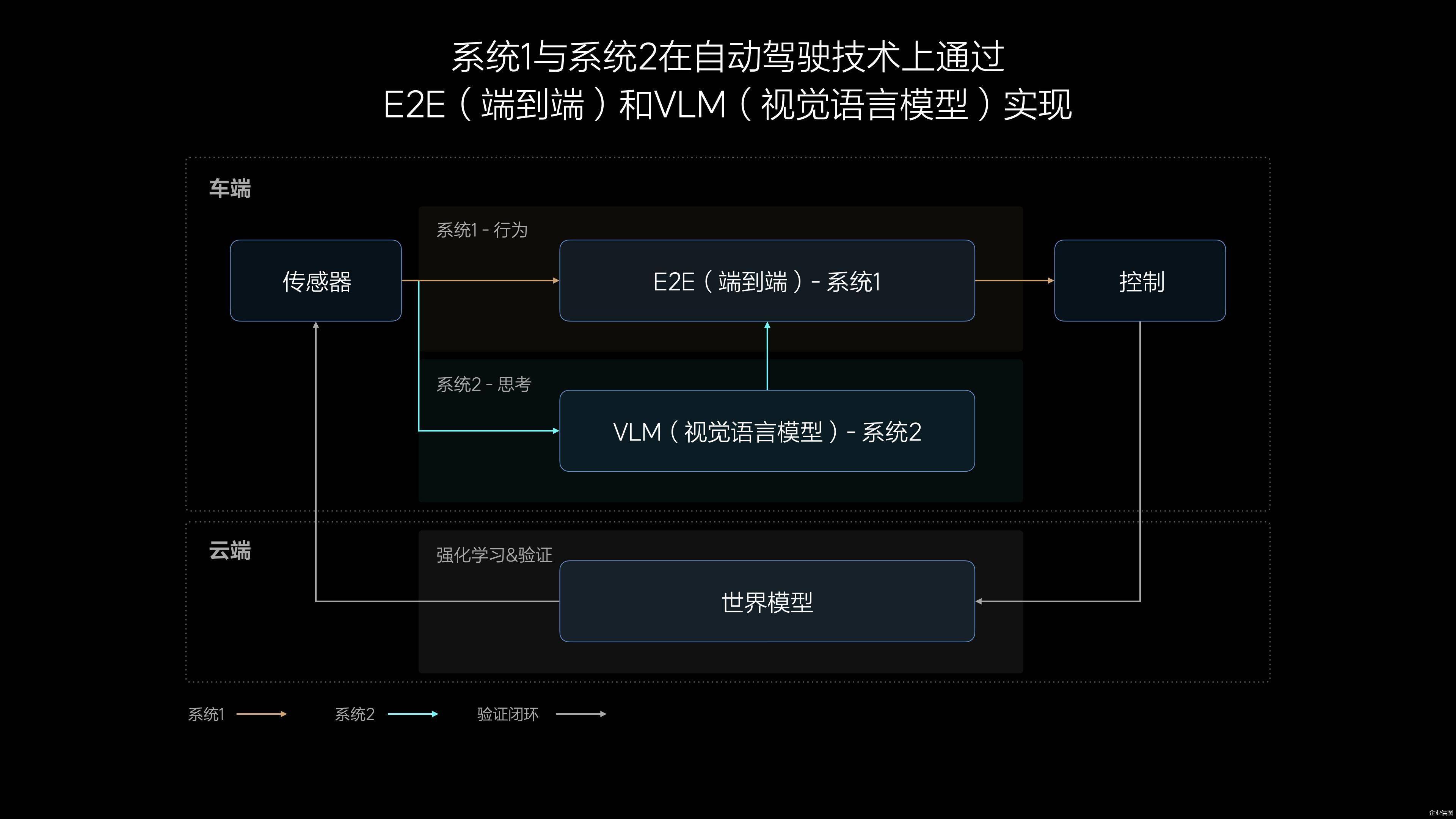
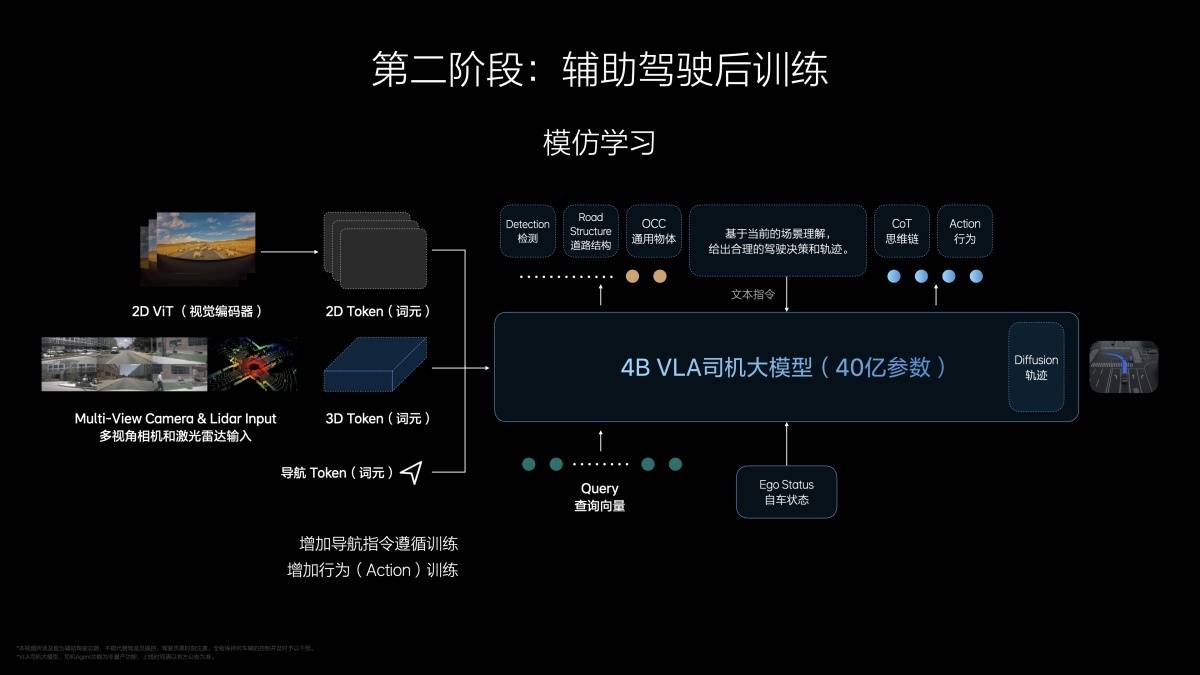
现阶段端到端阶段通过大模型学习人类驾驶行为(类似马戏团的动物),对物理世界的理解并不充分,需要配合视觉语言 VLM 模型,很难解决从未遇到过或特别复杂的问题,相当于哺乳动物的智能。
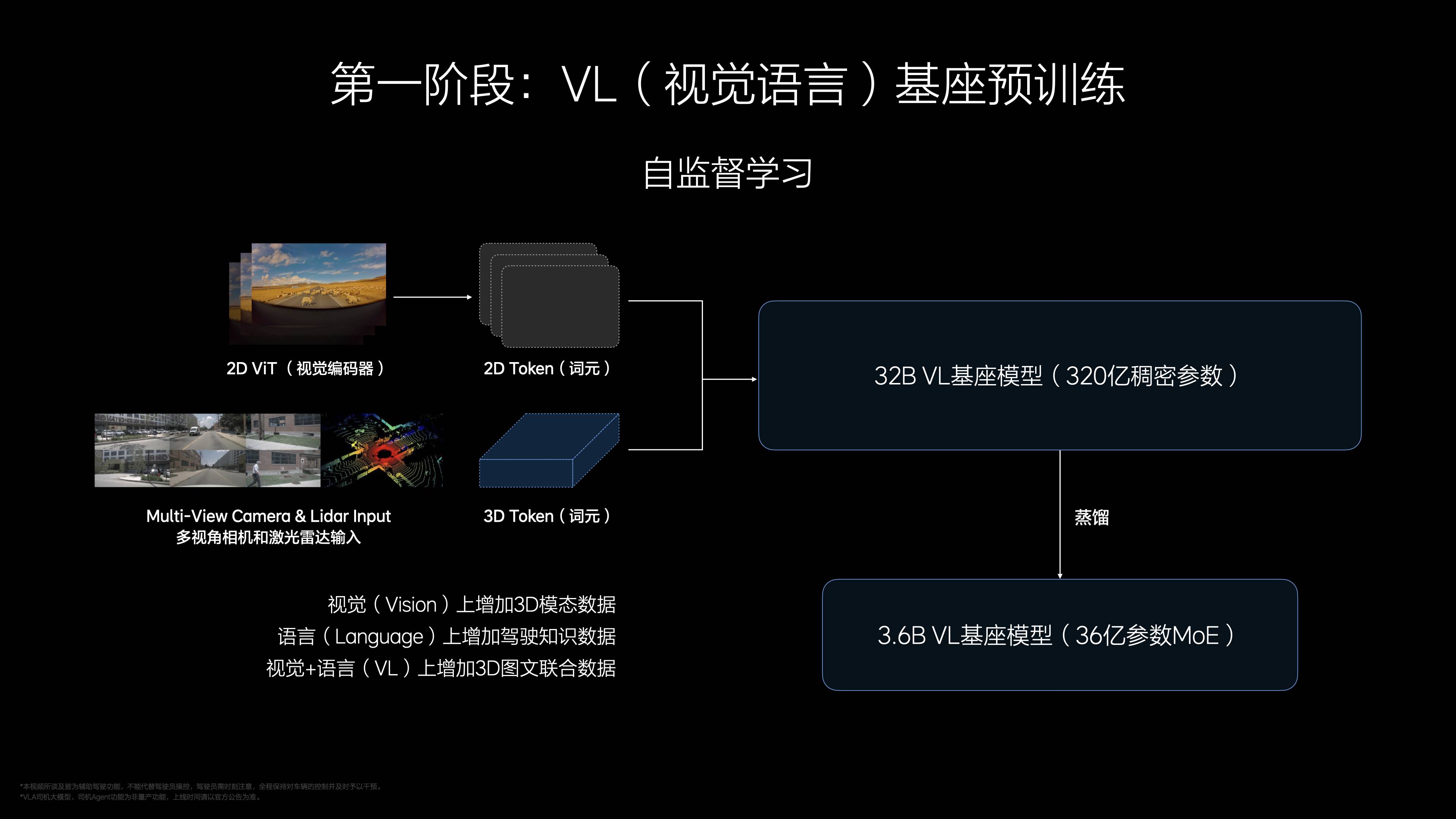
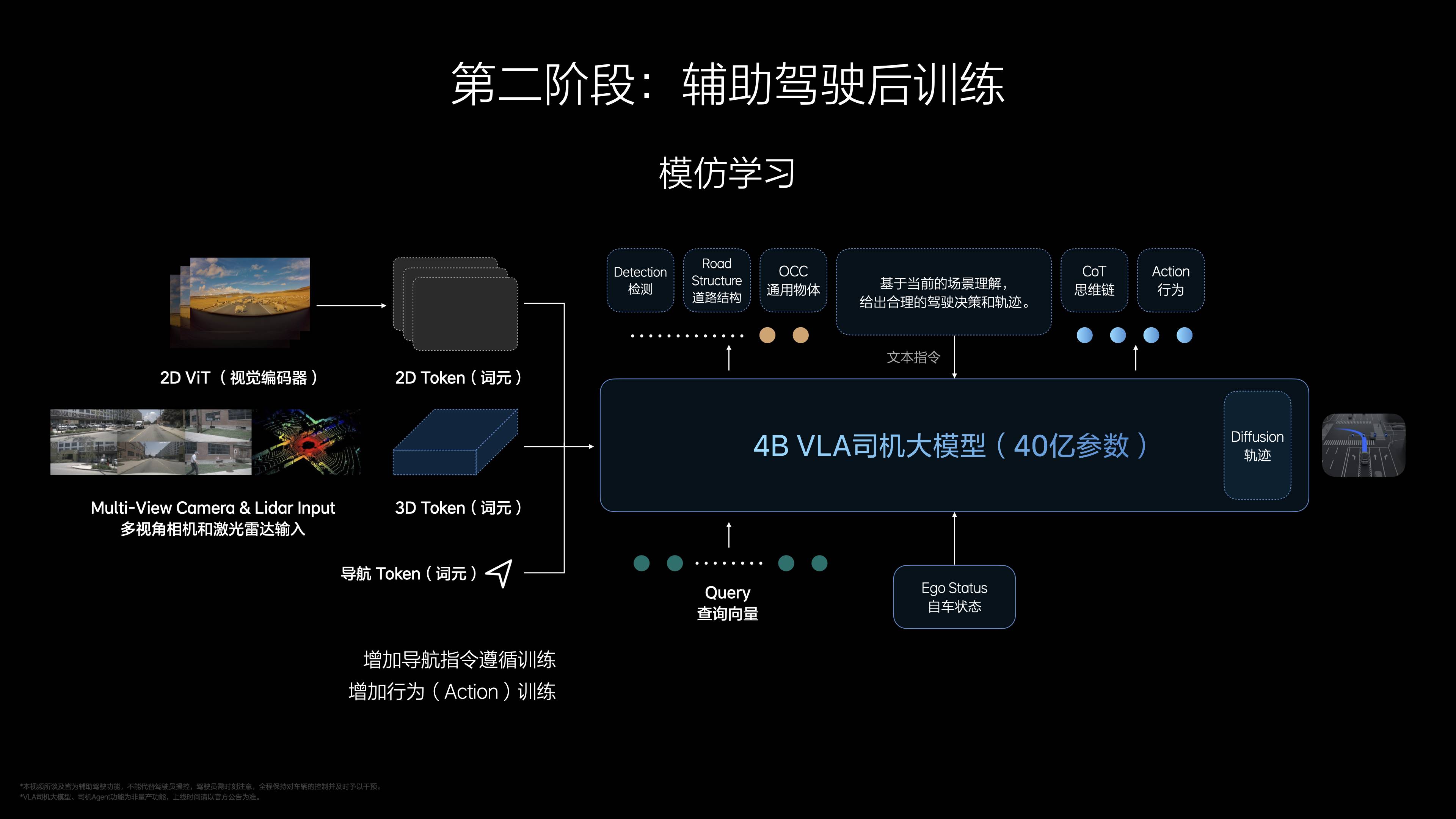
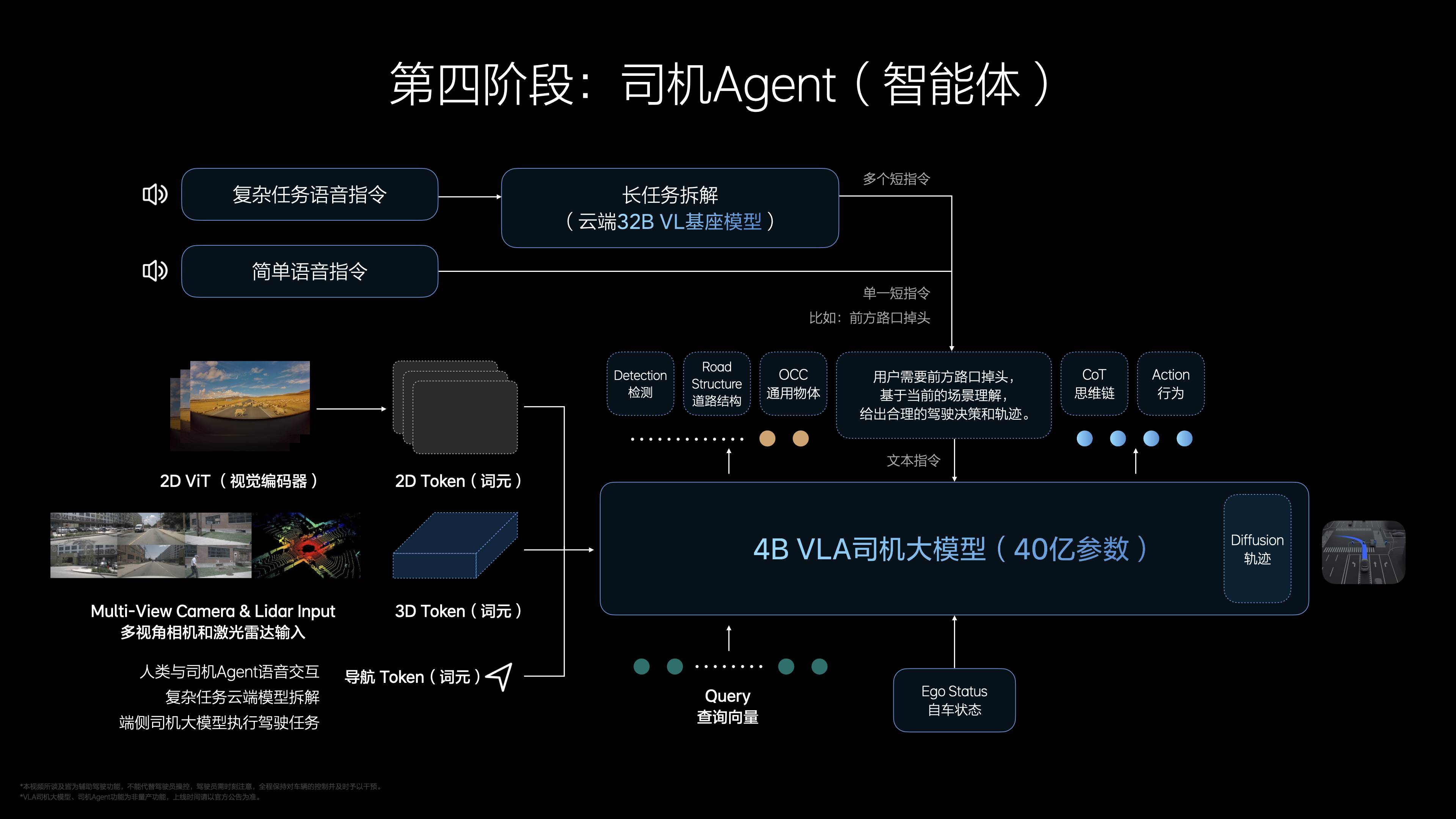
VLA 司机大模型阶段可实现类似人类观察世界的方式,利用 3D 视觉和 2D 的组合构建更真实的物理世界,拥有自己的脑系统,语言和思维链系统,类似于人类智能。
虽然解释起来很形象,但其技术难度,和研发投入需求,则是数百亿级别的。
理想解释技术的能力,很可能源于其产品能力,无论是通过昆虫,哺乳动物和人类的三级别智能水平来解释 VLA 司机大模型的能力,还是去年通过「快思考和慢思考」来解释端到端加 VLM 模型的辅助驾驶技术,都是一种降低理解门槛,凸显技术和产品价值的沟通技巧。
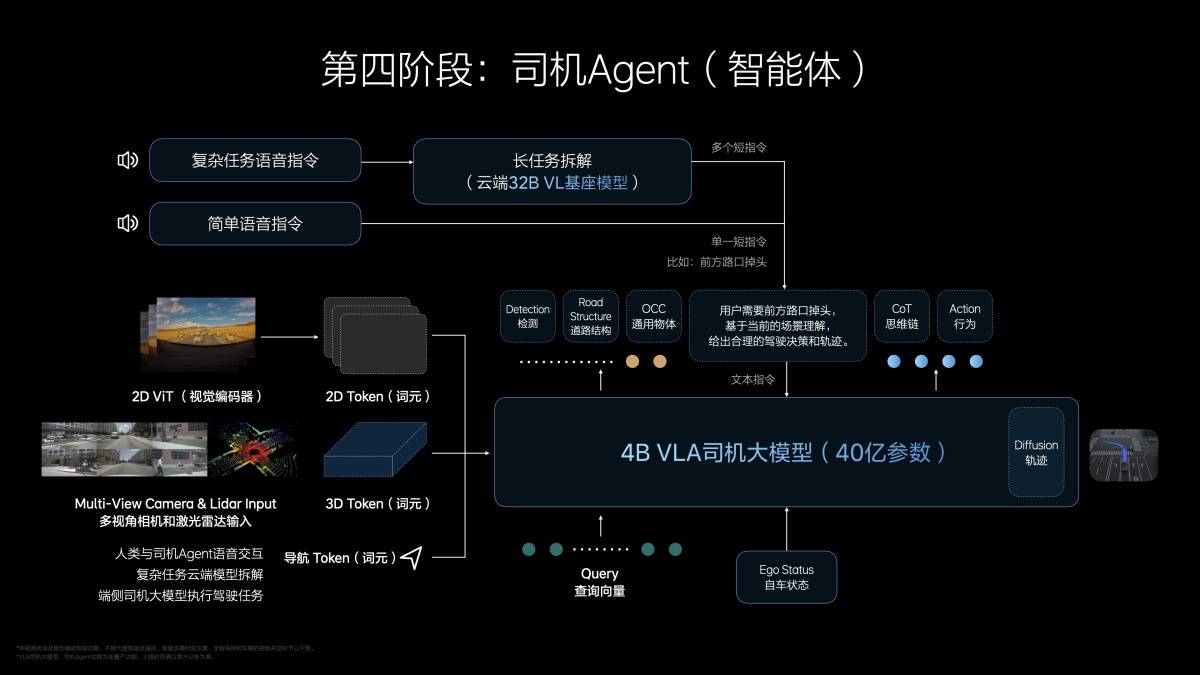
这种「沟通技巧」也存在于产品之中,比如李想就说,VLA 司机大模型做完不是结束(实际上,很多企业会在这一步就结束了),还需要一个司机 AI Agent 用来用户和这个辅助驾驶进行交互,以自然语言的形式,分短指令和长指令分级处理。
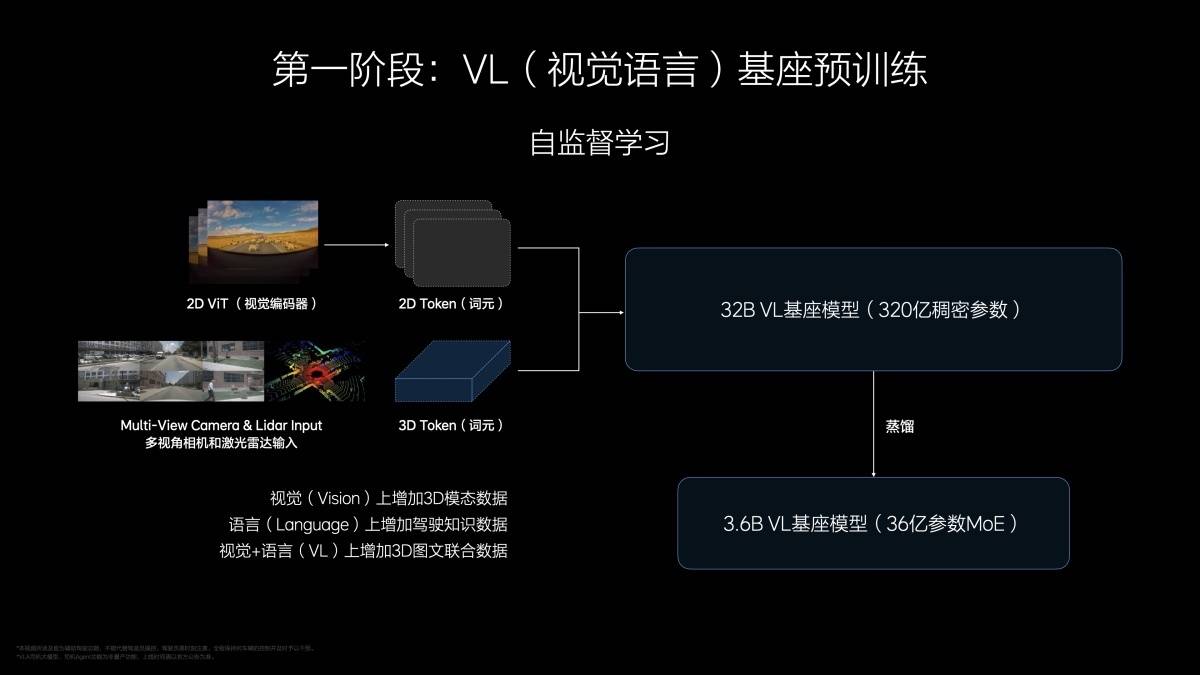
有意思的是,VLA 司机大模型当中需要一个大语言模型(也就是 VLA 当中的 L 部分),理想内部已经在进行自研,预计今年 9 月份交付,但恰好年初 DeepSeek V3 和 R1 面世和开源,引发行业巨大震动。
此时理想发现,理想自研大语言模型不会比 DeepSeek 更强,于是索性切换到 DeepSeek 开源模型,放弃了自研的执念,获得了 VLA 司机大模型的整体加速。
技术最优未必产品最优,产品的系统性决定了对于具体产品来说,没有最先进的技术,只有最适合的技术,所以具体到这一次的 L 系列焕新版来说,依旧还是「落后」的增程,但电池整体更大了;VLA 司机大模型业界独有行业领先,但里面有个谁都能用的 DeekSeek V3&R1 开源大模型……
这些矛盾吗?
其实不矛盾。
#欢迎关注爱范儿官方微信公众号:爱范儿(微信号:ifanr),更多精彩内容第一时间为您奉上。